V
主页
京东 11.11 红包
Carmaker-Truckmaker快速上手
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
Carmaker-Truckmaker软件ROS获取惯导数据
Truckmaker-Carmaker的CAN配置
Carmaker-Truckmaker动力学模型简要配置
《控制理论基础》:从ADRC到MPC
Carmaker-Truckmaker感知目标级别输出2
Carmaker-Truckmaker+ROS获得雷达数据
Carmaker-Truckmaker生成CM—ROS项目
无人驾驶CAN通信快速入门:部署、测试,全过程精细讲解(主讲录制人:严正清;技术小组:小组:陈云、贾岚博、刘志强、张连会)
天津大学无人驾驶采棉机-作业过程剪辑
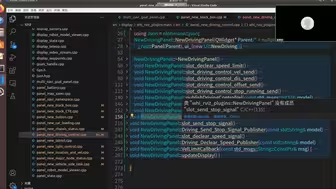
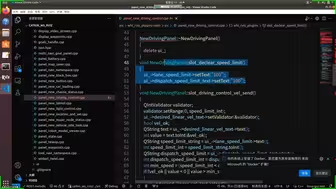
Carmaker-Truckmaker的HIL雷达配置模块
Carmaker-Truckmaker与ROS联合仿真文件结构介绍
2:30秒开始 - 无人驾驶-RVIZ界面开发-程序demo,C++&&QT,RVIZ,车辆位姿显示,任务指令下发,故障监控;手把手实现-讲解人-孟春阳
SLAM算法三小时即可入门!计算机大佬十节课精讲让你从零到一快速掌握SLAM理论及无人驾驶实战!
控制基础:从反馈到PID控制
激光雷达rslidar_sdk快速入门:部署、测试,全过程精细讲解(主讲录制人:严正清;技术小组:小组:陈云、贾岚博、刘志强、张连会)
2024届本科生毕业设计-1
《控制理论基础》:PID控制
马斯克将人类世界一夜带入——赛博世界2075!特斯拉Robotaxi发布会!
控制理论基础2024:反馈控制入门与控制系统的误差分析 - 无人驾驶碾压机,零型一型系统与稳态误差的关系,前馈控制,反馈控制,终值定理
Carmaker-Truckmaker上下位机配置与感知目标级别输出1
研一同学在2024首届车路云一体化挑战赛取得佳绩:58支队伍中获得第2/5/12名
控制理论基础》:稳定裕度理解的延伸与系统校正(上)
《控制理论基础》: 闭环系统的综合与校正-下
《控制理论基础》稳定性的代数判据及频率响应入门
天津大学无人驾驶叉车/夹抱车2.0:在新疆八师一二一团德鑫农机-农业合作社(棉花轧花厂)部署落地应用-2024-11-4(陈云、贾岚博、刘志强、张连会)
无人驾驶激光雷达点云建图lego-loam快速入门:部署、测试,全过程精细讲解(主讲录制人:严正清;技术小组:小组:陈云、贾岚博、刘志强、张连会)
QT人机交互界面开发方法:自车位姿显示、故障监控、车辆指令、任务下发,车辆载重设置、ROS通讯、QT5&C++ - 主讲人:孟春阳
天津大学无人驾驶叉车控制系统1.0(倍速播放)
《控制理论基础》:从PID到ADRC
01-控制理论基础2024 - 绪论(自动控制-机器学习-动力系统交织发展、动力控制与无人驾驶,随堂竞赛介绍)
特斯拉重磅!马斯克搭乘无人驾驶出租车亮相 车内无方向盘和踏板
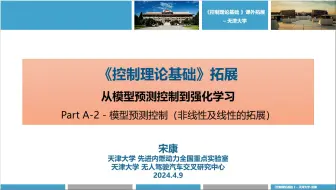
从模型预测控制到强化学习-2:非线性MPC的求解与应用(PPT高清版)
内燃机控制技术课程01A:现代内燃机控制的新特征
天津大学无人驾驶叉车-夹抱车调试记实:2024年10月14日提升作业流畅程度,2层堆垛,自动摆放。下一个目标:实现一字排布码放
1-2:控制理论基础2023
无人驾驶“狼来了”!特斯拉新车没有方向盘和踏板,我们怎么办?
控制理论基础2022:频率响应(上):Bode & Nyquist plots入门
控制理论基础2022:PID参数整定 & 离散系统入门(结课)
二阶ADRC的推导与仿真演示-2020年组内培训
2024级研究生入学培训 - 理解精彩绝伦的ADRC,启蒙神奇的MPC