V
主页
京东 11.11 红包
《控制理论基础》稳定性的代数判据及频率响应入门
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
从模型预测控制到强化学习-6:SARSA及Eligibility Trace
《控制理论基础》:从PID到ADRC
2024控制理论基础: 第17-18课时,稳定性判据(续)与稳定裕度的计算 - 梳理Nyquist来龙去脉,分析稳定裕度的计算方法,指出相位和幅值裕度局限性
《控制理论基础》:PID控制
控制理论基础2022:模型线性化
02-控制理论基础2024:从微分方程到传递函数建模(巧妙却难解的卷积,活灵活现的拉氏变换、极点-时域解的呼应、终值定理有妙用:抽象数学背后是精彩的物理原理 )
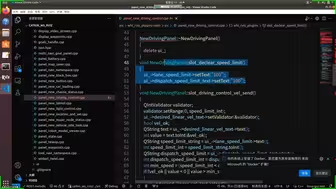
2:30秒开始 - 无人驾驶-RVIZ界面开发-程序demo,C++&&QT,RVIZ,车辆位姿显示,任务指令下发,故障监控;手把手实现-讲解人-孟春阳
《控制理论基础》:系统辨识与控制系统的离散化
01-控制理论基础2024 - 绪论(自动控制-机器学习-动力系统交织发展、动力控制与无人驾驶,随堂竞赛介绍)
07-控制理论基础2024 - 第13-14课时:从传递函数到频率响应,从频率响应反求传递函数:Nyquist与Bode图的绘制
06-控制理论基础2024: 第11-12课时-代数稳定性判据与频率响应,稳定性的内涵、稳定性的代数判据、频率响应入门 – 认识bode图、 认识Nyquist
15-16《控制理论基础》:Nyquist and Bode plots
从模型预测控制到强化学习10:“直来直往-直接给策略推荐”的确策略梯度(PG)方法REINFORCE-A2C-原理与仿真
从模型预测控制到强化学习-5:Q-learning(通透梳理版)
QT人机交互界面开发方法:自车位姿显示、故障监控、车辆指令、任务下发,车辆载重设置、ROS通讯、QT5&C++ - 主讲人:孟春阳
【变身】噬魂魔吞噬人类肉体获取黑暗力量,化形成美少女
从模型预测控制到强化学习-11:确定性策略梯度DPG与随机策略梯度SPG,从控制的角度理解(D)DPG, A2C, QAC, REINFORCE
控制理论基础 - 第19-20课时 - 系统的串联校正-为什么要做校正,超前校正、滞后校正、超前-滞后校正到底应该如何设计?PID与积分-超前滞后校正的相似性
从模型预测控制到强化学习-9:仿真、理解和可视化形式各异的DQN算法
乘用车动力学模型的理解-2020年
《控制理论基础》:从ADRC到MPC
控制理论基础2022:频率响应(上):Bode & Nyquist plots入门
控制理论基础2022:PID参数整定 & 离散系统入门(结课)
从模型预测控制到强化学习-7:梳理QL&SARSA,引出DQN的系列tricks
03-从动态控制到学习优化-精华串讲-3:模型参数辨识-最优控制与强化学习的桥梁-动力系统抗扰控制
03-控制理论基础2024-典型环节的传递函数及其时域响应:为什么分析典型环节,非线性模型线性化方法,一二阶系统时域响应,通过指数函数理解为什么二阶系统会振荡
《控制理论基础》:频率稳定性判据(下)
二阶ADRC的推导与仿真演示-2020年组内培训
2024级研究生入学培训 - 为什么用积分控制?回味无穷的PID控制
控制理论基础2024-习题5-21b: 理解非最小相位的特殊性
从模型预测控制到强化学习-2:非线性MPC的求解与应用(PPT高清版)
02-从动态控制到学习优化-精华串讲-2:进阶版ADRC-降阶-升降阶ESO-时延补偿-预测ESO-MPC控制
控制理论基础2024:动态系统的性能描述、调节及反馈控制入门-负反馈放大器的神奇,性能指标,比例控制,误差随增益的变化
2024级研究生入学培训 - 什么是动态系统,简单实用有趣的P-PD控制
01-从动态控制到学习优化-精华串讲-1:什么是动态系统-传递函数是怎么来的-为何用PD控制-PID的特点-ADRC的由来
《控制理论基础》:根据频率特性反求传递函数&Nyquist稳定性判据(上)
从模型预测控制到强化学习12:DDPG做动态控制-研究生入学培训答疑
开启你的第三只眼丨852赫兹丨松果体激活丨双耳节拍丨第三眼脉轮丨冥想音乐
控制理论基础2022:典型环节的传递函数
9-10:《控制理论基础》:反馈控制入门与系统的稳态误差(上)