V
主页
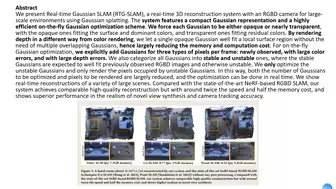
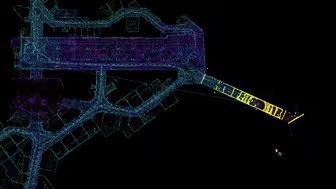
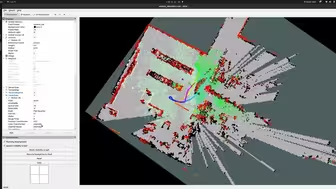
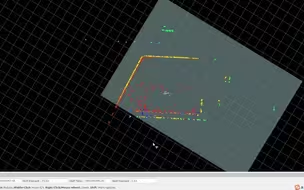
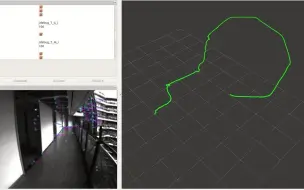
视觉里程计swift vins
发布人
在单目vins的基础上,加入轮速里程计和IMU融合的odom,做的demo,对于角度约束很理想,但是视觉的深度和里程计的线性系数的耦合退化暂时没有很好的解决办法
打开封面
下载高清视频
观看高清视频
视频下载器
动态点云过滤2
无人驾驶局部定位:轮速计+IMU超轻量DR里程计
高速道路隧道内SLAM建图
多激光雷达在线标定
多摄像头多地图视觉惯性定位系统 (VILO):实时精准定位方案
一个没啥特点的工程化激光slam(某二线城市的“大型”地铁站)
【空间计算】VIOBOT2 室内 定位 导航【里程计】【实测】
fastlio建图与自主导航演示
IMU激光雷达自动标定
SLAM园区高精度建图
Go2开发教学10-SLAM 导航服务接口
【地瓜创客孵化营】基于RDK X5的无人驾驶自行车视觉方案验证测试(后面会开源)
11月15日组会:RTG-SLAM: Real-time 3D Reconstruction at Scale Using Gaussian Splatting
要啥激光雷达,Factor Perception SDK夜间纯视觉SLAM演示
rovioli视觉VIO
自己组装一台巡检机器人需要多少银两?
高速路点云地图建图过程
谁说跑VSLAM就得小心翼翼?我们的VIO鲁棒性爆表,放心用,还有200 Hz的高帧率定位输出
SLAM高速路/隧道建图
无人机搭载livox avia采集点云数据,rosbag记录数据,FAST-LIO建图
无人机SLAM入门教程(一):课程概述1.1 SLAM基础概念
使用 Isaac Sim 和 Isaac ROS 实现 AMR 视觉导航
浙大章国锋团队最新NIS-SLAM:突破神经隐式语义RGB-D SLAM的极限(上篇)
基于Gazebo的无人车激光SLAM建图与导航仿真
矿洞扫描有难度?看赛尔S10如何轻松应对!
22年十佳开源SLAM算法
禾赛at128纯激光定位
使用Isaac对Orin NX进行硬件在环测试(视觉SLAM)
多旋翼无人机使用多相机SLAM同时定位
如何从手持SLAM数据到MESH网格
第五届SLAM论坛高飞报告
动态点云过滤(多趟离线去除)
[北京地铁]西南一隅 深入房山 北京地铁燕房线下行前方展望POV
多激光雷达自动标定
视觉SLAM VIO开源代码解析
自动驾驶入门技术全栈实战解析-1-感知篇
IEEE RAL空间机器人视觉导航/SLAM算法评估 Pyojin Kim发表首个舱内机器人外太空视觉-惯性数据集
IROS'24开源 | 全新动态V3D-SLAM:3D语义几何投票的动态鲁棒RGB-D SLAM
[IEEE TCSVT 2024]语义无关的动态SLAM
Tesla刚刚发布了Cybercab的最新宣传视频,让我们一起看一下未来Robotaxi的使用场景