V
主页
人体视图合成新方法HVS-Net!使用单视图、稀疏的RGB-D输入
发布人
主页:https://www.phongnhhn.info/HVS_Net/index.html 一个新的视图合成框架,从任何人的不可见视图中生成逼真的渲染,视图由一个具有稀疏RGB-D的单视图传感器捕获,类似于一个低成本的深度相机,并且没有特定的演员模型。视频展示了该方法在单一稀疏的RGB-D输入的情况下生成高质量的合成和真实人类演员的新视图。它可以通用于未见过的身份、新的姿势并忠实地重建面部表情。该方法优于先前的人类视图合成方法,并且对不同程度的输入稀疏度具有鲁棒性。 论文名称:Human View Synthesis using a Single Sparse RGB-D Input
打开封面
下载高清视频
观看高清视频
视频下载器
最新开源|支持惯性、激光雷达、双目和RGB-D传感器的系统!
双目VIO+点线特征+抗动态光照! 南洋理工最新开源!
【开源】DSOL:一种快速直接稀疏里程计方案,处理速度提高5倍!宾夕法尼亚大学
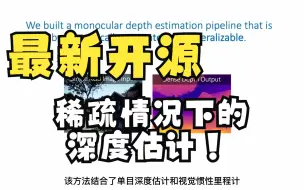
英特尔最新开源|50%以上的降低,适用于稀疏情况下的深度估计!ICRA2023
【原创】优秀开源代码盘点:稀疏视觉SLAM/SfM
ICRA2022|浙大&商汤等发布紧耦合RGB-D视觉惯性VIP-SLAM,速度快2倍!
港科大等发布! EgoHDM:一种在线第一人称视角-惯性人体动作捕捉、定位和稠密建图系统
MIT|仅用RGB相机作传感器,实时定位机器人!无需依赖初始姿势估计!
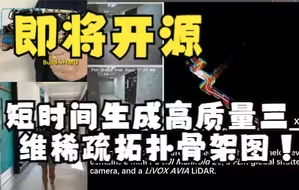
【IROS2022】港科大&大疆即将开源|短时间生成高质量三维稀疏拓扑骨架图,移动机器人的全局规划!
上海交大最新开源|GNSS/INS/Camera融合导航库GICI-LIB
哈工大、北师大、清华开源!逼真的3DGS人体化身
爆火!ReconX:3D场景重建新范式!输入两张图片,给你一个3D逼真场景!
350km+的记录,cm级精度的数据集!用于自动驾驶的视觉长期定位!TUM开源!
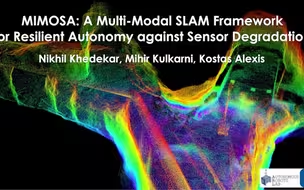
这个多模态SLAM可实现任意传感器数量松耦合,在GPS、视觉传感器失效时仍稳如老狗!
【最新开源】ECCV2022|小姐姐活灵活现,将单视图语义转换为NeRF!莫纳什大学&南洋理工最新发布
无需额外数据,输入文本即可合成高清一致的图像!首尔大学,即将开源!
人体任意视角打光,解决光影反射等问题!南洋理工新开源,ECCV2022!
【开源代码】SG-Net: 单阶段视频实例分割效果展示丨CVPR2021
MIT发布|无需lidar和IMU之间的相对定位,即可提供高速率的里程计估计!
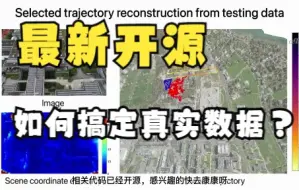
如何搞定真实数据?匹配的合成数据+跨模式表征学习即可!EPFL新开源,CVPR2022
【六哥答疑】视觉SLAM目前效果最好的开源算法有哪些?
【最新开源】ECCV2022|清华用单目RGB视频实现人体捕捉3D重建!
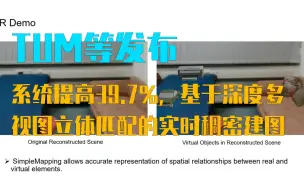
TUM&MCML发布|系统提高39.7%,基于深度多视图立体匹配的实时稠密建图!
清华等开源! EmbodiedSAM:实时在线分割任意3D物体
AI绘画是作弊?评委不这么认为!!!
【最新开源】SIGGRAPH 2022|在线试衣?输入文本即可任意更换衣服搭配,太有用了!南洋理工&商汤等新工作
【智驾系列8】占据网络为什么对自动驾驶很重要?
用文字、涂鸦等生成图片!英伟达提出PoE-GAN方法
有效处理遮挡、反光等问题,接近实时的三维重建!英伟达即将开源,CVPR2023!
1.2 如何快速学习开源代码?
CVPR2021丨单一图像纹理三维模型的视图泛化
如何更高效学习GNSS、RTK定位?(含30+论文及两本电子书下载)!
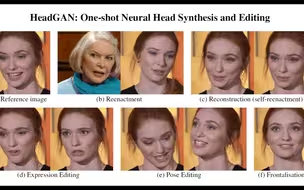
【前沿论文】帝国理工&华为提出头部合成和编辑算法,ICCV 2021
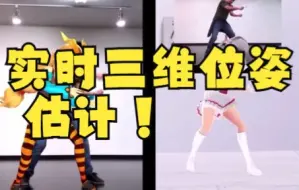
整活了!实时三维位姿估计!
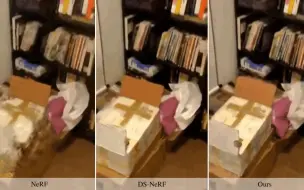
开源!CVPR 2022|TUM&谷歌研究院:基于稠密深度先验的稀疏NeRF重建
【开源】CVPR2022|UBC&谷歌研究光场渲染的新视图合成,可准确再现场景!解决了反射、折射和半透明等问题!
浙大&Google最新发布|RGB图像引导下的基于轻量ToF传感器的深度估计!ECCV2022!
强推!2024医学生必看的【人工智能+医疗】全套教程,迪哥从零开始手把教学,导师不教你的知识本课程统统告诉你,讲的非常全面!
Transformer技术原理,论文讲解!带你秒懂Transformer底层逻辑原理!真的通俗易懂!(人工智能、深度学习、机器学习算法、神经网络、AI)
中科大新发布|轻量级神经路径规划,高效、低成本的机器人导航方法!