V
主页
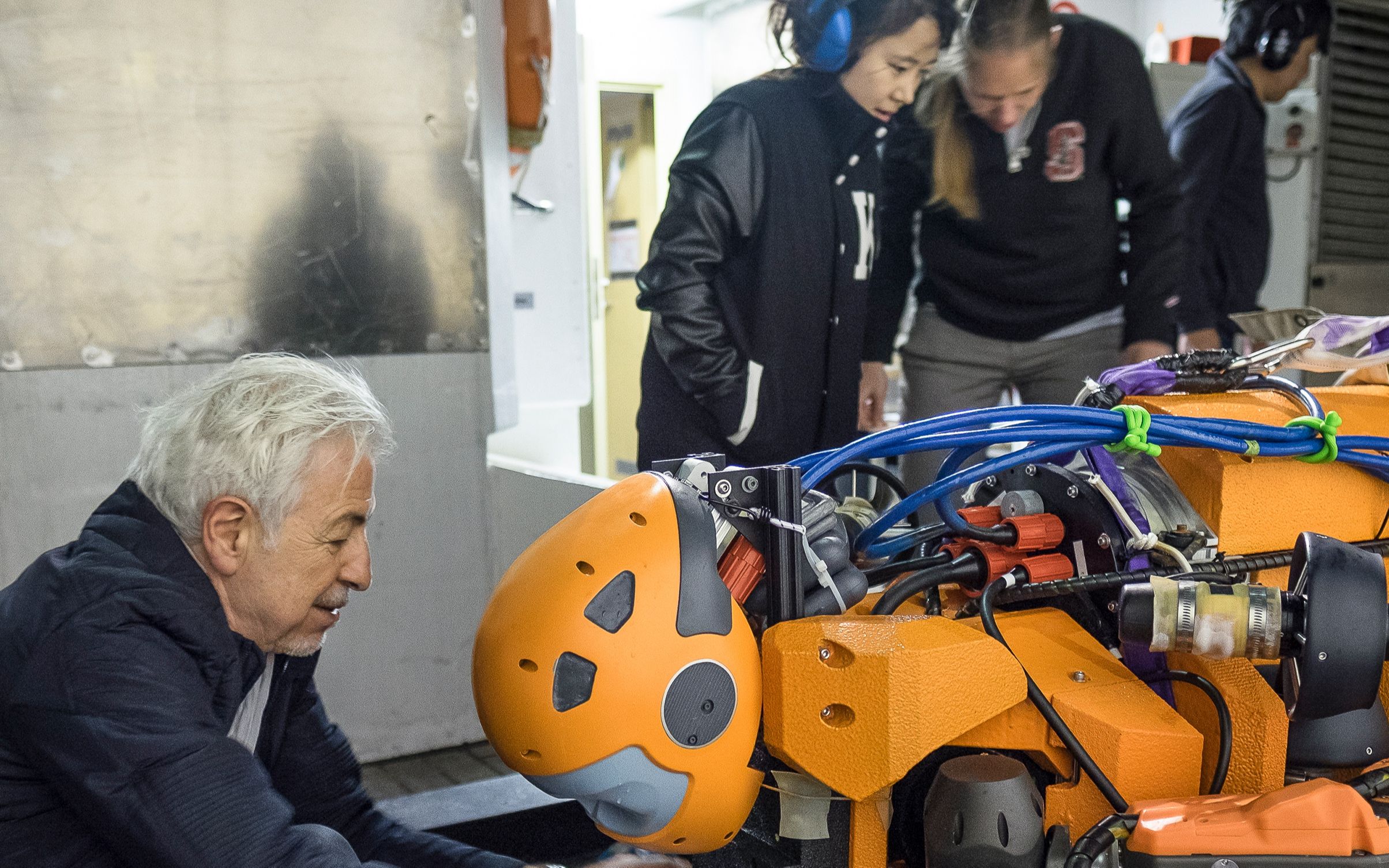
机器人学导论|2007|Oussama Khatib【Stanford】
发布人
斯坦福大学Oussama Khatib教授机器人学公开课,课程将介绍机器人系统基础部分的建模、设计、规划以及控制,包含了来自几何学、运动学、统计学、动力学以及控制理论的内容。https://see.stanford.edu/course/cs223a 教材及讲义见链接:https://pan.baidu.com/s/1i1jTkEPBNCZkbxkTGWaXLg 提取码:p4xm
打开封面
下载高清视频
观看高清视频
视频下载器
准备爬行「3D打印爬行机器人」|2016【東京大学】
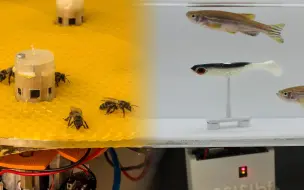
机器人使蜜蜂和鱼能够相互交谈|2019|EPFL洛桑联邦理工学院【Science Robotics】
蜘蛛启发的电液软驱动关节|2021【马克斯普朗克智能系统研究所】
软机器人学习爬行|2022【丰田工业大学芝加哥分校】
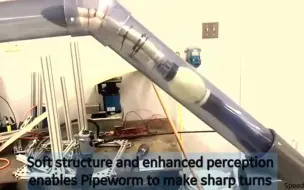
管-虫机器人“Pipe-worm” Robot|2022【通用电气】
自动布肌肉纤维「软体机器人」|2020【迪士尼Disney】
Strandbeest进化|2021【Theo Jansen】
神经步态:学习双足运动|2022【加州理工Caltech】
birdbot:一种高效节能的机器人腿|2022|Science Robotics【德国马克斯·普朗克研究所】
半机器甲虫:像机器人一样被控制的真正昆虫|2016【南洋理工大学】
HyperLeg:用于高动态运动的类人机器人腿和脚|2023【韩国技术教育大学】
无人机学习在空中用机械手开门|2023【苏黎世联邦理工学院】
充气机械手为截肢者提供实时触觉控制|2021【MIT & 上海交通大学】
飞龙机器人:空中机器人实现了工业阀门操作|2022【東京大学】
开源动力机器人倡议:四足机器人Solo和双足机器人Bolt|2022【纽约大学&马普所&苏黎世联邦理工】
遥操作Little HERMES双足机器人|2019【MIT】
两轮跳跃机器人「Ascento」2020【苏黎世联邦理工学院】
基于Arduino的动态眼睛机制
轻量膝关节外骨骼|2022【TRO】
Magnecko;机器人像蜘蛛侠一样爬墙和天花板|2023【苏黎世联邦理工学院】
全自动番茄剪枝机器人Kompano|2021【荷兰Priva】
无气气球Airless Balloon (2022)|山中俊治【東京大学】
月球探测机器人“SORA-Q”|2022【日本TAKARATOMY联合日本宇宙航空研究开发机构】
Google机器人学研究概述🔥|2023|Francesco Nori【DeepMind】
多臂有效载荷操作-混合现实|2022【苏黎世联邦理工学院】
除杂草机器人|2022【瑞士Ecorobotix】
启用虚拟移动「本田Avatar Robot」分身机器人|2021【日本本田技研工業株式会社】
驾驶座上的鱼:以色列科学家教金鱼操作车辆|2022【以色列本古里安大学】
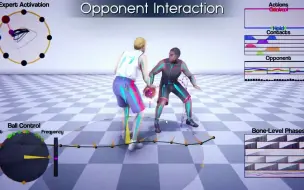
AI4Animation:基于深度学习的动画角色控制|2022【ACM Trans. Graph】
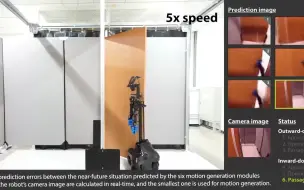
机器人开门和进门的具身性预测模型|2022|早稻田大学【Science Robotics】
ElectroVoxel:模块化自重构机器人|2022【MIT】
冒死上传(已被开除)! 花了三千买的顶级费曼学习法,学习一小时胜过十小时,世界公认最好的学习方法!费曼学习法丨高效背书 学霸推荐的最有效方法 提高学习效率
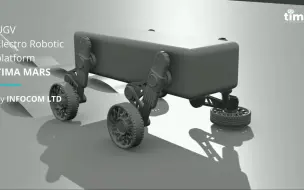
轮足机器人|2021|TIMA【乌克兰】
Ballie|2020【韩国三星】
SpaceBok:低重力下像猫一样跳跃的机器人|2022|ETH Zürich【T-RO】
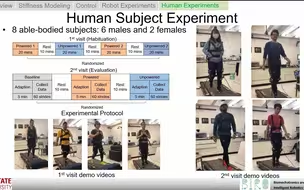
动力假肢TF8|2020【MIT】
MIT mini cheetah通过无模型学习实现敏捷运动|2022【MIT】
超能力者之手「假肢🦾ESPER HAND」|2020【Esper Bionics】
做我能做的,而不是我说的:机器人基础语言|2022【谷歌•机器人】
机器人如何学会徒步|2022|ETH Zürich【Science Robotics】