V
主页
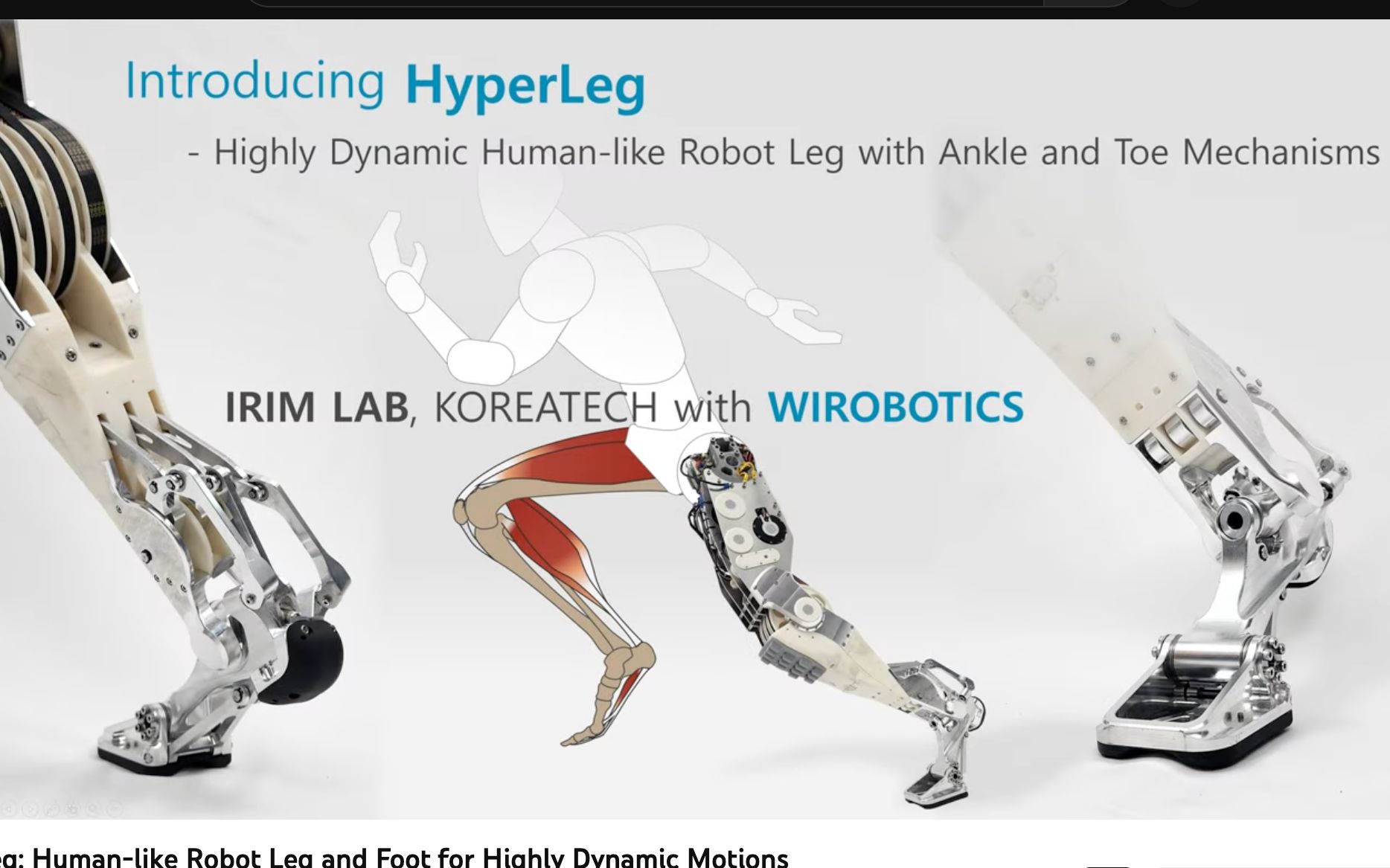
HyperLeg:用于高动态运动的类人机器人腿和脚|2023【韩国技术教育大学】
发布人
HyperLeg: Human-like Robot Leg and Foot for Highly Dynamic Motions https://www.youtube.com/watch?v=wLFCMwRvhVI
打开封面
下载高清视频
观看高清视频
视频下载器
loco-mujoco:MuJoCo模仿学习复杂运动任务|2023【德国达姆城工业大学】
谷歌AutoRT:具身智能大模型机器人大型编队|2023【Google Deepmind】
开源人形机器人Hector:人形运动操纵控制|2023【南加州大学】
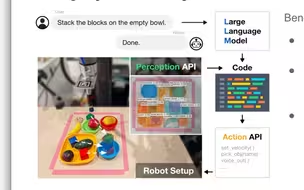
代码作为策略: 用于具身控制的语言模型程序|2023【Google】
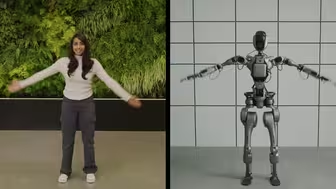
NVIDIA Robotics:从自动驾驶到人形机器人|2024【英伟达】
Science:AI自主合成化学机器人RoboChem|2024【荷兰阿姆斯特丹大学】
ViPlanner:用于局部导航的视觉语义学习 |ICRA 2024【苏黎世联邦理工学院&英伟达】
微小型管道机器人:实现亚厘米级管道探测|2022|清华大学【Science Robotics】
RobotSketch: 腿式机器人超快速设计的交互式展示|SIGGRAPH 2024【韩国科学技术院】
四足机器人的极限地形穿越|2023【卡内基梅隆大学】
开源库PyPose:无缝连接经典机器人技术与现代学习方法|2023【CMU】
BIOIC线驱软连续机器人|2022【德国弗劳恩霍夫研究所】
RoboHive:机器人学习的统一框架|2023【CMU】
开源Swarm-SLAM: 多机器人同步定位与地图构建|2023【加拿大蒙特利尔大学】
机器人从人类活动和模拟交互的视频中学习|2023【metaAI】
快递机器人WAVE:最后一英里交付机器人平台|2023【韩国汉阳大学】
Barkour:四足机器人实现动物级敏捷性|2023【Google DeepMind】
人形机器人Atlas:40年发展|波士顿动力 (1983 - 2023)
模仿鱼群行为的机器人集群控制|2024 ICRA【西班牙格拉纳达大学】
FluidLab:复杂流体操作|2023【卡耐基梅隆大学】
Simple-BEV: 多传感器BEV感知真正重要的是什么?|ICRA 2023【斯坦佛大学】
准备爬行「3D打印爬行机器人」|2016【東京大学】
四足机器人:全身操纵学习|2023【韩国KAIST】
学习轮腿机器人的鲁棒自主导航和运动|2024|Science Robotics【苏黎世联邦理工学院】
全身动态远程运动|2023【伊利诺伊大学厄巴纳-香槟分校】
Text2Motion:从自然语言指令到可行方案|2023【斯坦福大学】
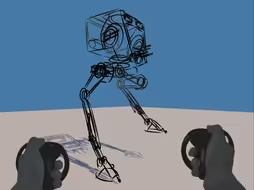
被动动态双足行走:迈向乐高大小人形机器人|2022 ICRA【卡内基·梅隆大学】
Deepmind开源ALOHA 2:双手遥操作低成本硬件|2024【谷歌】
卡通人形机器人:Mirokaï|2023【法国Enchanted Tools】
管道攀爬机器人:RSTAR|2022【Ben-Gurion University of the Negev】
国产大尺寸仿鸵双足机器人 “大圣”|2023【五八智能科技(杭州)】
Ballie|2020【韩国三星】
OPT-Mimic:模拟动态四足动物行为的优化轨迹|ICRA 2023【不列颠哥伦比亚大学】
用于可扩展电子皮肤的神经启发人工外周神经系统|2019|新加坡国立大学【Science Robotics】
半机器甲虫:像机器人一样被控制的真正昆虫|2016【南洋理工大学】
avlmaps:用于机器人导航的视听语言地图|2023【弗莱堡大学】
Ascender:世界上第一个爬楼梯的机器人吸尘器|2023【migorobotics】
六足攀爬机器人|2019【日本法政大学】
鸵鸟机械臂: 基于鸵鸟颈部解剖结构和行为的机械手|2023【東京大学】
在大型、复杂的世界中进行高效自主探索|2023|Science Robotics【CMU】