V
主页
双目相机如何读取图像数据
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
IMU参数标定终于有人讲清楚了
【全网最详细】双目摄像头原理分析
【全网最详细】RGB-D相机原理分析
单目相机如何标定
IMU的数据为什么要滤波
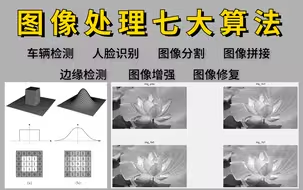
【图像处理入门到精通】七大算法:图像分割、图像拼接、车辆检测、人脸识别、图像增强、图像修复、边缘检测一次讲完!三天带你从入门到进阶!
【浅显易懂】卡尔曼滤波原理解读
编码减速电机是什么
【全网最详细】摄像头原理分析
搞机器人开发如何选电脑主机
多传感器融合的本质
IMU如何测加速度
搞SLAM算法为什么要学李群和李代数
【机器人操作系统】ROS本质上就是一个分布式通信框架
机器人中的IMU有什么用
用 Cursor 爬央行数据,写了一辈子代码,从来没有这么丝滑过!
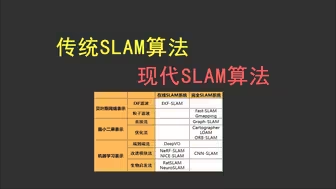
【史上最全】一图读懂机器人SLAM核心技术
【一看就懂】SLAM算法原理通俗解读
图像ORB特征提取速度为什么快
【开源无人船】从零组装一艘开源ROS无人船
【激光SLAM专题】Cartographer如何运行
仅需一步,瞬间提升树莓派5的AI算力,化身性能猛兽!
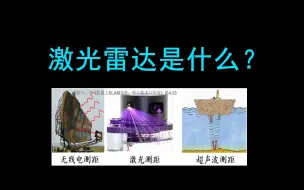
激光雷达是什么
SLAM算法的底层框架概率图模型
分享几个ROS简单的脚本
IMU如何测磁力
卡尔曼滤波的本质
激光雷达畸变校准
图像滤波的原理终于有人给讲明白了
【开源无人机】零基础首飞一架开源无人机
一本书打通机器人SLAM导航中的软件技术、硬件技术、数学理论、工程落地等一系列问题。
SLAM算法实现为何基于ROS接口
SLAM算法有哪些
机器人竞赛基础技术讲解(2)-9月18日
印度老哥在算法上的天赋毋庸置疑!
1.8 MIT 计算机教育中缺失的一课
【激光SLAM专题】GMapping原理通俗易懂
最小二乘问题直接求解
无人机地理定位缺少数据集?厦大新思路:GTA-UAV利用游戏生成新基准数据集!
【3分钟】快速了解SLAM算法的本质