V
主页
京东 11.11 红包
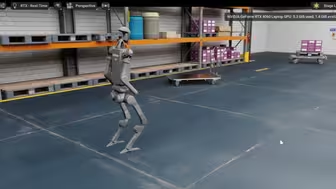
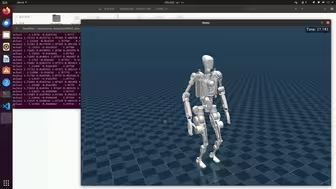
傅利叶GR-1 sim2sim到Mujoco环境中
发布人
Reference:https://sites.google.com/view/humanoid-gym/ BGM:再见 ——邓紫棋
打开封面
下载高清视频
观看高清视频
视频下载器
multi_grasp
傅利叶GR-2:开启人形新征程
【Python】人形机器人——全身控制
pairwise motion piror与原版amp高速运动对比效果
人形机器人sim2sim行走测试
强化学习框架-Legged Gym 训练代码详解
Open AI Figure02最新行走视频
RA-L 2024 | CDM-MPC 结合质心动力学和模型预测控制的人形机器人连续跳跃
搜维尔科技:使用Xsens动作捕捉系统和ai训练人形机器人模仿人类运动,执行复杂任务
体验Isaac sim4.2中的人形机器人示例
Run, Booster T1, run! 大步跑向 IROS 2024!
Semantic Traversability Estimation Using Pose Projected Feature
[旋转 跳跃 后空翻] 四足/人形机器人的分阶段奖励塑造:一种受约束的多目标 RL 方法 | 开源代码在简介
青龙openloong加上状态估计
宇树Go2-W挑战障碍上下楼梯#IROS2024
宇树G1抗干扰性能展示 #人形机器人
宇树Go2-W 轮足越障能力展示#IROS2024
倒立,我是认真的……嘿嘿!
ACM SIGGRAPH Asia 2024 | RobotMDM:机器人运动扩散模型:机器人角色的运动生成
很喜欢跺脚的机器人#IROS2024
宇树B2-W轮足载人
老年照护的未来?——人居环境机器人“5号”(The Five,小五)
Agile Continuous Jumping in Discontinuous Terrains
具身智能机械臂实操入门课程-01:软件环境配置和双臂标定
Diffusion-based Path Planner for Synthesizing Trajectories Applied on Quadruped
鸵鸵带着它的老铁来参加数贸会啦
很好的强化让我的diablo起飞
OCS2 安装例程demo测试 太难安装了 但是库确实牛!!!
为啥人形机器人不能站直了走路?从科学角度来讲讲!
来看一下国内仿人、类人形、人形机器人的发展
在人形机器人仿真训练领域,博特勒对传统仿真(Sim2Real)方法的创新优化
马斯克演示特斯拉机器人背后是真人远程遥控只有走路是AI自主
SOTA ! 浙大最新成果!四足强化学习走梅花桩!
新品上市!逐际动力发售首款多形态双足机器人TRON 1
运控记录 | 使用ocs2框架,实现单腿六自由度人形机器人Hi的行走
【即插即用】Pybullet端强化学习算法训练机械臂
上海工博会进入倒计时,明天最后一天啦!今天和明天还可以来现场打卡哦~
穿戴式遥操作机械臂实现人形机器人实时随动
一些基于NVIDIA Isaac Gym的开源机器人虚拟环境 无人机 水下ROV
【登长城 逐旷野】