V
主页
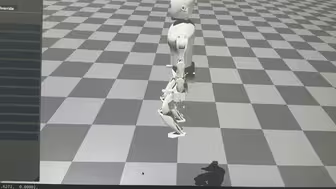
pairwise motion piror与原版amp高速运动对比效果
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
AMP为啥一定得包含这个A呢,我换个Pairwise loss可不可以呢?看视频~(调试中,目前其实不算很理想)
步态好些了,但是感觉爬楼还是一般,扎心了
基于强化学习的go2 sim2real部署展示(业余爱好大佬勿喷)
不平地形的摔倒恢复实验,自己的狗子实验啊,感觉又是一砸一个坑
一次性训了一个带fall recovery 和 velocity tracking的policy,目前步态看着还成
试验失败系列2:基于MANN的policy,其实走的还成,就是上楼梯太暴力了,得再改改…
感觉比之前好多了呢(rl运控实验成功系列)欢迎大家给我的repo加star~
终于玩上了!在Isaac实现unitree H1的运动仿真
调了如此久,感觉上楼梯稳定性还是差,都开始怀疑自己是不是上楼的时候把腰杆推歪了
为什么Isaac gym 读取的速度不等于位置的微分呀,用pd算的力矩不就是错的吗
成功小实验系列1:修改了下reward然后kp30 kd0.75训练以及部署,貌似姿态还改善了呢
人形双足模仿学习强化学习AMP ASE Exbody求助
强化学习第一步---换个模型玩
代码库更新系列一:大家快来康康!github :LocomotionWithNP3O
RA-L 24浙大最新成果Parkour with Implicit-Explicit Learning Framework for Legged Robots
试验失败系列1号作品:基于transformer的rl policy(希望下次能好点吧…哭泣)
试验不咋成功又不咋失败系列1:继续是MANN的policy,但是,调完之后步态还是不咋好看,流泪了
RL vs MPC,LeCun:MPC,胜!我不看好强化学习
PiPER:仅售 2,499 美元 AgileX 的下一代轻型机械臂!
OpenAI o1能像人类一样「深思熟虑」,作者们顿悟了这些问题
宇树 H1 升级版 自由度展示#人形机器人
震惊!之前央视也曾报道过UFO!原来是为了打预防针,25会是透明期和接触期。
四足机器人跌落姿态调整 基于强化学习的机器人控制
AI超级进化! AI自己写代码设计的智能体, 水平碾压人类?
试验成功系列2:基于MANN的policy,改了些东西之后稳定多了(动作还是很丑呢)
三指灵巧手,强化学习手内灵巧操作连续成功
上海交大张伟楠强化学习课程第15讲:AI Agent与决策大模型III
训练了下转向,感觉还行
Jeff Dean:飞机上放床 抬 Hinton 到 DeepMind 他们的代码真整齐
2024年无人机实战项目介绍
青龙人形机器人开源强化学习库GymLoong测试
ALOHA模仿学习ACT真机实践——笨蛋机械臂两天才学会瓶子
互联网史上最大的未解之谜之一,蝉3301事件
对象说就叫:小 狗 军 团 🐕
我们抱歉
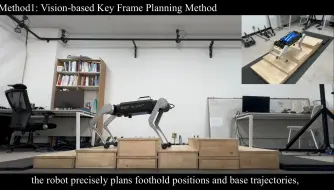
四足运动:用三种不同的方法在崎岖地形上行走
深度强化学习Carla实战-SAC算法(一)
强推!这可能是B站最全的(Python+机器学习+深度学习)系列课程了,不愧是上海交大和腾讯联合出品!堪称人工智能系列课程的巅峰之作!-人工智能/深度学习
你现在可能就在黑洞里
无人机穿越树林视觉自主避障