V
主页
京东 11.11 红包
43 发那科机器人在程序中删除程序行
发布人
发那科机器人编程教程
打开封面
下载高清视频
观看高清视频
视频下载器
第20讲 KUKA机器人调用当前位置变量
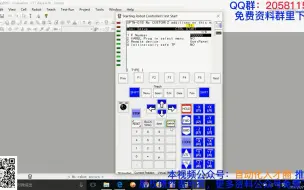
75 发那科机器人使用运行面板控制机器人
S7-1200 Modbus RTU通信(3)-编写主站程序
第27讲 KUKA机器人配置自动模式
S7-1200的以太网的PROFINET通信a
17_1KUKA机器人使用workvisual
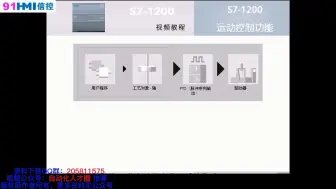
S7-1200运动控制功能(3)-编写程序
78 发那机器人科快速切换观察面
S7-1200 Profibus-DP通信(3)-编程测试
01 发那科ROBOGUIDE仿真软件安装
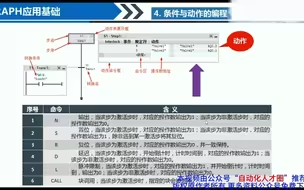
第46课时.GRAPH应用基础
07 发那科机器人三点示教方法
01 发那科机器人公司及产品介绍
18 发那科机器人用户坐标系的使用 切换用户坐标系
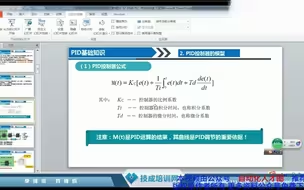
第35课时.S7-1500PLC的PID控制实例
S7-1200的自由口通信(1)-设置参数
41 发那科机器人在程序中使用注释
S7-1200的USS通信(1)-变频器参数设置a
KUKA机器人高级编程(下)2-2 用KRL编写运动指令C
S7-1200 使用数据块示例
S7-1200运动控制功能(1)-任务要求
14_4KUKA机器人流水生产线的搬运、码垛运动编程
51 发那科机器人查看机器人当前坐标
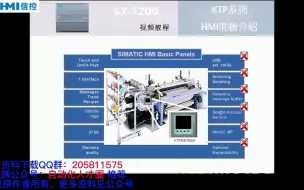
S7-1200 KTP系列HMI面板介绍a
S7-1200 编程软件界面介绍
S7-1200 带参数FC的编程示例
06 发那科机器人程序编辑方法
44 发那科机器人在程序中复制程序代码
11 发那科机器人三点法标定工具坐标系定点的操作过程
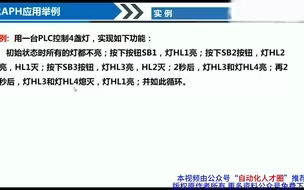
第47课时.GRAPH应用举例
第34课时.S7-1500PLC的PID参数整定
76 发那科机器人用位置编辑器编辑点坐标
16.S7-1200多重背景第一讲a
79 发那科机器人用模型面板创建数模
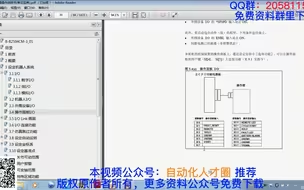
08 发那科机器人专用io分配
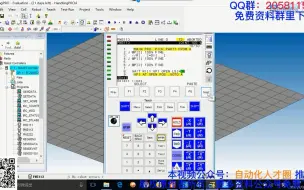
69 发那科机器人使用Move To面板快速定位
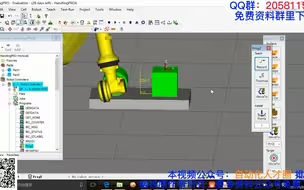
66 机器人仿真软3D操作方法
S7-1200 使用Portal视图
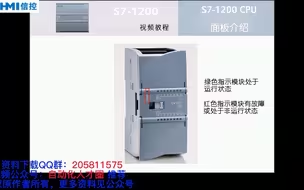
S7-1200 CPU面板介绍a
S7-1200 比较指令