V
主页
基于状态空间模型预测控制的四旋翼路径跟踪实现
发布人
基于状态空间模型预测控制的四旋翼路径跟踪实现 1. 利用已有的四旋翼运动学与动力学模型 2. 建立MIMO状态空间模型,包括非线性模型与简化后的线性模型 3. 引入约束MPC控制,分别设计线性MPC控制器与非线性MPC控制器。 4. 基于matlab的仿真实验,运行获得轨迹跟踪的图片和数据 5. 跟踪问题就是找到一个合适的控制输入,使得跟踪误差最小 5. 含报告和使用说明
打开封面
下载高清视频
观看高清视频
视频下载器
模型预测控制学习资料汇总
自动驾驶模型预测控制轨迹跟踪
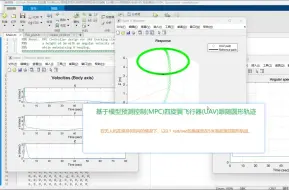
【圆形轨迹】基于模型预测控制(MPC)四旋翼飞行器(UAV)跟随控制
学习记录2:四足机器人MPC控制MATLAB计算仿真
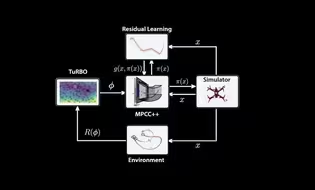
(RSS'24) MPCC++:具有安全约束的时间最优飞行的模型预测轮廓控制
【一区论文复现】自适应强化学习机械臂控制
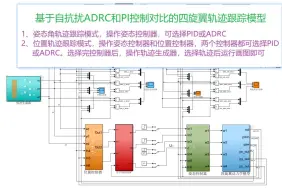
基于自抗扰ADRC和PID控制对比的四旋翼姿态角和位置轨迹跟踪模型
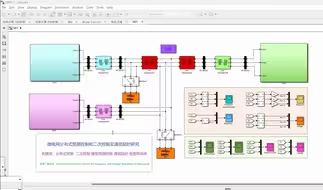
【一区论文复现】微电网分布式预测控制和二次控制及通信延时研究
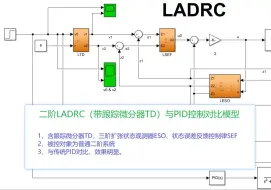
二阶LADRC(带跟踪微分器TD)与PID控制对比模型
【MPC】二自由度机械臂模型预测控制MATLAB 带参考文献
RTK履带无人车户外曲线路径跟踪(精度3cm内)
输入受限约束下基于NMPC的四旋翼轨迹跟踪控制
PID控制四旋翼轨迹跟踪含三维图像模型
2024级研究生入学培训 - 理解精彩绝伦的ADRC,启蒙神奇的MPC
基于反步法or滑膜控制orPID控制的四旋翼无人机轨迹跟踪模型
基于模型预测控制和下垂控制的光伏储能充放电模型
【网盘自取】锁相环理论知识分享
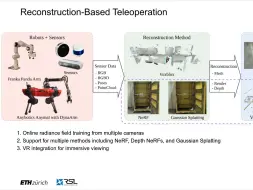
ETH | Anymal 机器人远程操作的辐射场
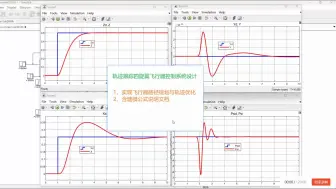
轨迹跟踪四旋翼飞行器控制系统设计
三相逆变器模型预测控制MPC(包括PQ功率预测和电流预测S函数实现)
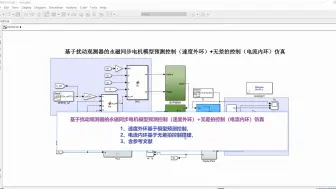
基于降阶龙伯格扰动观测器的永磁同步电机模型预测控制(速度外环)+无差拍控制(电流内环)仿真
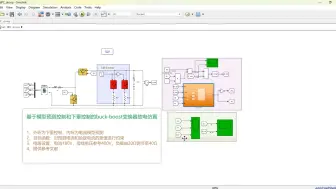
基于模型预测控制和下垂控制的储能电池buck-boost变换器放电仿真
改进的变步长扰动观察法光伏MPPT最大功率跟踪(含小步长和大步长对比)
4.1 MPC项目实战:非线性系统切换MPC仿真
基于有限控制集模型预测(FCS-MPC)相角补偿法三电平并网逆变器
RRT星(RRT-star)机械臂轨迹避障末端拟合轨迹算法+三次b样条优化路径拟合
3.1 MPC项目实战:非线性系统线性MPC仿真
基于模糊自整定PID控制的四旋翼无人机俯仰姿态保持模型
基于扩张观测器和新型非奇异快速终端滑模的永磁同步电机无差拍预测控制模型
基于自抗扰ADRC控制的四旋翼飞行姿态控制模型
【复现】光伏并网逆变器接入弱电网的序阻抗建模扫频法与稳定性分析
基于传统和改进三矢量模型预测电流控制的永磁同步电机模型
二自由度机器人迭代学习PD型控制
基于无差拍预测控制加入延时补偿的永磁同步电机仿真
1-7-6 MSPM0烧写总结
四旋翼无人机起飞的CONVERGE仿真【同名公众号“CFD之音”】
基于LQR控制主动悬架模型7自由度(整车)
基于单矢量模型预测电流控制的永磁同步电机仿真模型(可选单矢量/双矢量/三矢量)
全桥LLC参数计算设计书(Mathcad)(含变压器开关管等器件选型)
基于RRT路径规划算法及梯形速度规划六自由度机械臂避障代码