V
主页
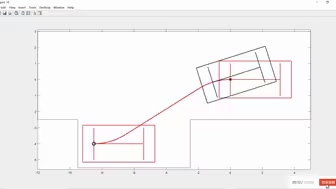
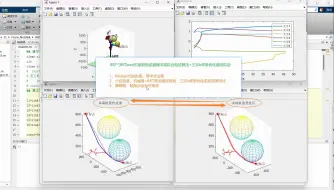
轨迹跟踪四旋翼飞行器控制系统设计
发布人
轨迹跟踪四旋翼飞行器控制系统设计 1、实现飞行器路径规划与轨迹优化 2、含建模公式说明文档
打开封面
下载高清视频
观看高清视频
视频下载器
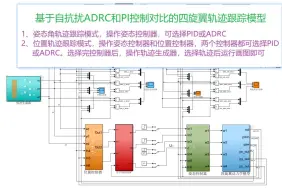
基于自抗扰ADRC和PID控制对比的四旋翼姿态角和位置轨迹跟踪模型
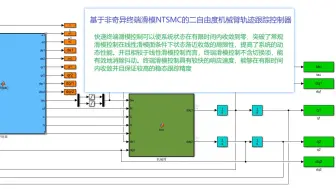
基于非奇异终端滑模NTSMC的二自由度机械臂轨迹跟踪控制器
输入受限约束下基于NMPC的四旋翼轨迹跟踪控制
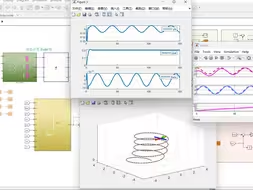
PID控制四旋翼轨迹跟踪含三维图像模型
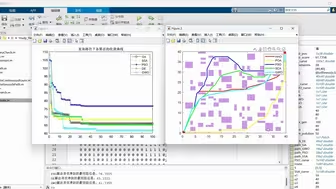
五种经典算法优化机器人路径规划【粒子群-遗传-灰狼-麻雀优化-差分进化】
A*路径规划算法
基于反步法or滑膜控制orPID控制的四旋翼无人机轨迹跟踪模型
乘用车侧方位停车
移动机器人自主路径规划
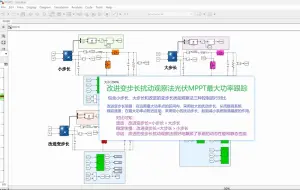
改进的变步长扰动观察法光伏MPPT最大功率跟踪(含小步长和大步长对比)
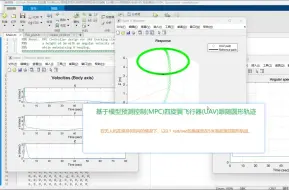
【圆形轨迹】基于模型预测控制(MPC)四旋翼飞行器(UAV)跟随控制
全桥LLC参数计算设计书(Mathcad)(含变压器开关管等器件选型)
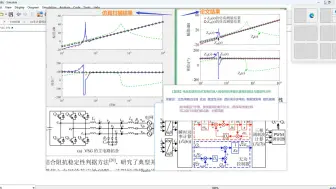
【复现】电压型虚拟同步发电机接入弱电网的序阻抗建模扫频法与稳定性分析
RRT星(RRT-star)机械臂轨迹避障末端拟合轨迹算法+三次b样条优化路径拟合
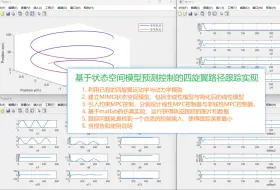
基于状态空间模型预测控制的四旋翼路径跟踪实现
自定义3d点云构建2d地图算法
《JPS跳点搜索算法》比A*算法快百倍的JPS寻路算法是怎么实现的
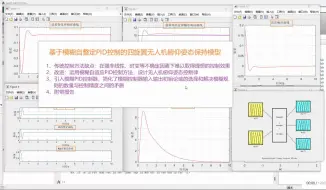
基于模糊自整定PID控制的四旋翼无人机俯仰姿态保持模型
基于Plecs的PI+PR控制图腾柱无桥boost PFC仿真研究
【复现】光伏并网逆变器接入弱电网的序阻抗建模扫频法与稳定性分析
(附代码)prescan仿真,路径规划+横纵向控制
基于自抗扰ADRC控制的四旋翼飞行姿态控制模型
A*路径规划方法
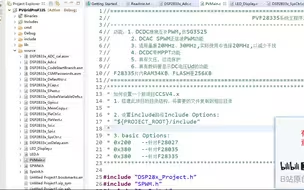
基于DSP28335光伏并网逆变器源代码原理图PCB方案
基于VSG控制(虚拟同步发电机控制)的模块化多电平变流器MMC
强推!2024年站最系统的无人驾驶技术全套教程,一口气带你学完感知实战、视觉定位、路径规划、预测系统,从入门到进阶!!!(自动驾驶/无人驾驶/人工智能/AI)
二自由度机器人迭代学习PD型控制
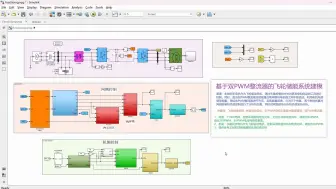
基于双PWM整流器的飞轮储能系统建模
物流搬运小车 自启动 无需远程
【S型速度轨迹规划】六自由度机械臂
基于stm32低压无感BLDC方波控制方案(代码+原理图)
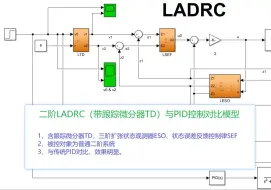
二阶LADRC(带跟踪微分器TD)与PID控制对比模型
【SS拓扑】基于移相控制的磁耦合谐振无线电能传输系统仿真
电池均衡储能蓄电池充放电均衡控制SOC均衡下垂控制充放电(三组电池)
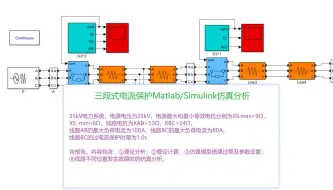
电流三段式保护继电保护课程设计Matlab/Simulink
【一区论文复现】自适应强化学习机械臂控制
【网盘自取】锁相环理论知识分享
基于下垂控制和PR控制的构网变换器
【网盘自取】电机控制软件设计和硬件设计解析文档资料
2024小破站高质量【无人驾驶自动驾驶】全套系统教程 | 从入门到实战精通,看完offer拿到手软!(路径规划/视觉定位/萝卜快跑)