V
主页
京东 11.11 红包
基于ROS2运行LIO-SAM,实现地下车库SLAM
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
DOM-60 为机器人带来前所未有的感知能力
基于NVIDIA Isaac Sim和LIO-SAM的激光SLAM demo
基于先验点云地图的激光定位(ROS2)
SLAM-Viewer,SLAM便捷可视化小工具
十七届智能车 智能视觉 60.655s 拿下国一!
IROS24:BE-SLAM: BEV-Enhanced Dynamic Semantic SLAM with Static Object Reconstruc
完赛! 封车! 开摆!2022年10月份电赛B题。
马斯克特斯拉机器人的最新视频和技术解析
液态金属机器人——黛西公主 #二次元 #黛西公主 #液态机器人
关于我的智能车之后的退休生活。
东北大学第八届RoboMaster机甲大师校园赛
这么简单好用的 ROS 定位方法,确定不要试一下吗?!
赛博朋克东南大学?“CYBATHLON2024”半机械人仿生奥运会夺冠!全程回顾
SLAM Zero to One
基于openmv的云台视觉跟踪 (故事要从一个橘子开始……)
视觉惯导融合SLAM内外参标定是关键
铰接式车辆的运动规划
为什么需要多传感器融合
轮式里程计激光里程计视觉里程计区别是什么
谨以此短视频致敬稚晖君发布并开源Dummy机械臂三周年
港科技最新SLAM数据集!SLABIM:香港科技大学主楼SLAM-BIM耦合数据集
SLAM算法三小时即可入门!计算机大佬十节课精讲让你从零到一快速掌握SLAM理论及无人驾驶实战!
IROS'24开源 | 全新动态V3D-SLAM:3D语义几何投票的动态鲁棒RGB-D SLAM
华山区大范围激光视觉惯性SLAM建图
动态环境中并行轨迹优化
火星上的SLAM 非结构环境中的飞行器建图和定位 太空机器人
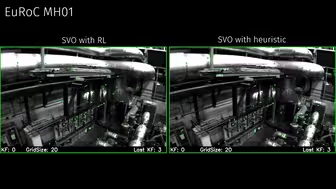
强化学习给视觉里程计自适应调参
【SLAM】【空间计算】RoboBaton系列产品正式亮相【三维重建】【AI赋能】
VINS算法视觉惯导融合SLAM
我做出了露娜的第二个机械身体,战双露娜,露娜,刀剑神域爱丽丝,机器人露娜,机器人爱丽丝
SLAM为什么需要机器学习
ChainSLAM实时建图演示
A Compact LiDAR Odometry and Mapping with Dynamic Removal
Fast LIVO 硬同步过程释疑
如何用706.9元做一个高精度的机械臂?
【SLAM】LoopSplats:通过直接的3DGS注册,实现密集建图和在线回环检测的全局一致性图优化
听劝不要轻易入坑SLAM
SLAM为什么需要IMU
slam多功能救援无人机
多摄像头多地图视觉惯性定位系统 (VILO):实时精准定位方案