V
主页
京东 11.11 红包
PID方法07 柴油机起动控制例子-解决方案
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
PID方法06 柴油机起动控制例子-策略
PID方法05 柴油机起动控制例子-要素分析
PID方法02 PID的基本思想
状态反馈方法 正07 全维状态反馈的图解例子
LQR方法 正02 解的存在条件
PID方法01 PID的基本结构
PID方法04 PID的物理意义
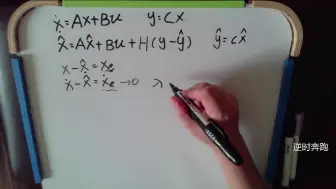
全维观测器-正05 观测与控制综合器
状态反馈方法 正08 不能控性条件的例子
状态反馈方法 正03 状态反馈的图解形式
状态反馈方法 正02 状态反馈的基本理论
PID方法03 PID的计算方法
LQR方法 正01 基本原理
全维观测器-正02观测器结构
状态反馈方法 正04 能控性条件
LQR方法 正04 综合例题与解分析
状态反馈方法 正05 能控性条件的证明
状态反馈方法 正01 状态反馈的基本思想
全维观测器-正04 基本算例
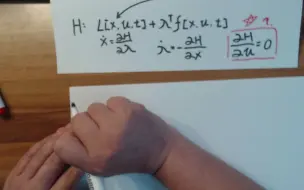
【最优控制速成1】H方程求解静态优化问题
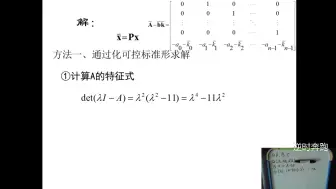
状态反馈方法 正06 全维状态反馈的解A-BK
李雅普诺夫稳定性理 正01 BIBO稳定性
LQR方法 正03 状态反馈的ARE解
【根轨迹7】起始角和终止角
【最优控制速成5】双积分的最优时间问题求解
李雅普诺夫稳定性理 正13 LYP第二方法的一般性示例
STM32小车工程模板(HAL库),使用常用模块,好移植,包含常用PID
快蜂bee25 GPS返航不点头pid设置:非常舒适,直接复制粘贴即可,pid在简介,个人的失控救援设置和rate值调整思路在第二个视频里边。
【最优控制速成2】欧拉方程解变分问题
李雅普诺夫稳定性理 正04 平衡状态与求解
李雅普诺夫稳定性理 正03 内部稳定性与外部稳定性
全维观测器-正03 收敛性条件
【最优控制速成6】Bang-Bang综合解
状态反馈方法 正09 全维状态反馈的综合
鱼缸 PWM+PID组成比女人还性感的温控系统 够做毕设了
李雅普诺夫稳定性理 正05 稳定性的定义
李雅普诺夫稳定性理 正07 稳定性及不稳定相关定义
【最优控制速成4】极小值原理
铅笔橡皮问题