V
主页
【SLAM】【VIO】双目视觉+超强三维感知力【功能演示——半稠密点云】“实测”
发布人
传统的稀疏点云建图缺少对场景细节的复原。由于生成的点云较稀疏,在纹理少或纹理复杂区域,均容易出现较大误差,甚至丢失跟踪。 黑森矩阵自研的 Stereo3 算法可实现半稠密点云建图,并对点云的大小差、高低差的调整,可以使大家更加直观的了解到机器人设备在运行中真正需要躲避的障碍物,可以把地面跟高位对机器人实际运行没有影响的点云丢弃,得到更好的全局世界观和完成避障。
打开封面
下载高清视频
观看高清视频
视频下载器
【SLAM】【VIO】双目视觉 +超强大的三维感知力 VIOBOT 【性能测试——高精度】“实测”
【SLAM】【VIO】双目视觉+超强大的三维感知能力【应用场景——办公室内】“定位&导航规划”“实测”【传感器】
【SLAM】【VIO】双目视觉+超强三维感知力【室内复杂空间内——同步定位.建图.导航】“实测”
【SLAM】【VIO】双目视觉 +超强大的三维感知力 VIOBOT【功能演示——地表爬纹】“实测”
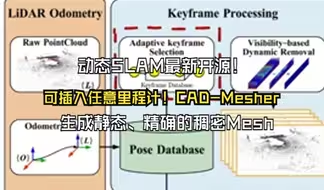
动态SLAM最新开源!可插入任意里程计!CAD-Mesher:生成静态、精确的稠密Mesh!
【SLAM】【VIO】双目视觉 +超强大的三维感知力 VIOBOT 【性能测试——鲁棒性强】“实测”
VIO核心组件 带你轻松感知三维世界!!!!科技魅力
[IROS 2024] AS-LIO: 空间交叠度指导的自适应滑窗激光惯性里程计
这三个网站,各种资源信手拈来!
r3live语义建图
【SLAM】【VIO】双目视觉+超强大的三维感知力+tof 相机 【功能演示+实时重建】“实测”
CU-Astro自主探索无人机室内外飞行演示:3.5寸紧凑型 (cuhk-usr-group)
滑铁卢大学发布! 迈向实时的高斯平滑:通过光度SLAM加速3DGS
【建议收藏】2024年最新的4个磁力网站!
[ICRA 2024] GCM
ORB-SLAM3有必要学吗
【亲测】今日头条 图文创作,AI一天自动写 50篇文章,单日轻松产出500+,可多号操作,小白轻松上手
TRLO: An Efficient LiDAR Odometry with 3D Dynamic Object Tracking and Removal
SD漫画助手5.5保姆级教程,保你能学会!!!拿走不谢,允许白嫖! AI绘画 (附百度SD安装包)
CVPR'24开源 | 吊打一切VINS!又快又好的视觉惯性导航系统!
【SLAM-2024】第五届全国SLAM技术论坛-浙江大学-高飞-自主飞行集群的感知与定位
End-to-End视觉里程计新突破:从运动模糊图像中精确估计相机姿态
threejs简单实现剖切透明效果
怎么重装Win7系统?不用U盘一键重装Win7系统教程 支持笔记本和台式机电脑
秋招迫在眉睫!如何快速上手企业级CV项目?跟着这套教程三小时掌握SLAM算法及其应用,简直不要太好懂!
大疆livox-mid360定位
视觉SLAM的本质多视图几何
微型无人机群SLAM
有暮光之城那味了
cesium按需加载
2小时超虐打光练习——总结
IGE-LIO:充分利用强度信息克服激光退化场景下的定位精度
SLAM与三维重建的区别
MPOC-SLAM: an RGB-D SLAM system with motion probability and object category in
狠狠码住这3个网站......
每天都跑几圈,机器人底盘,室内slam
073. 3速度电动RC车
CT三维可视化(2),三维建模,CT三维重建,CT分割,体积,面积测量,CT后处理
三星S25 Ultra曝光!超窄边框,电池技术大突破
ROS机器人基于gmapping的slam自动导航建图!