V
主页
[NeRF机器人] 斯坦福报告:Perception-Rich Robot Autonomy with Neural Environment Models
发布人
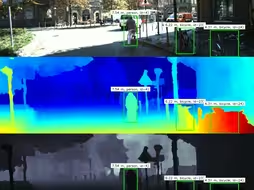
斯坦福大学Mac Schwager教授学术报告:Perception-Rich Robot Autonomy with Neural Environment Models。 介绍了NeRF基础,以及Pose estimation, SLAM backbone, 操控相关问题。也提到了包括UAV上的实验、NeRFBridge、LERF等斯坦福在NeRF+机器人上所做过的所有工作
打开封面
下载高清视频
观看高清视频
视频下载器
《没有工作的世界》作者、牛津大学教授在斯坦福大学演讲关于未来AI时代
【开源】也许会是目前功能最多的激光SLAM(Lidar SLAM)
[3DGS] 作者Bernhard Kerbl讲讲3DGS的历史、思考过程(感谢群友的投喂)
视觉SLAM的本质多视图几何
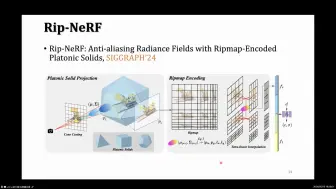
[大佬讲paper第三期] 腾讯AI实验室胡文博大佬讲神经渲染中的Anti-Aliasing问题,以及SIG24中的新作Rip-NeRF等相关工作
专访:斯坦福李飞飞教授回顾20年AI征程,并解读未来每份工作都需要AI技能
[NeRF进展,稀疏视角+depth先验] 南洋理工大学ICCV提出SparseNeRF,利用现实世界不准确观测的深度先验来蒸馏深度排名,达到较好的重建效果
[NeRF进展,城市建模] 南洋理工大学:CityDreamer,一种unbounded 3D城市设计的组合生成模型,效果超过SceneDreamer
[NeRF进展,鲁棒的动态NeRF] RoDynRF CVPR最终presentation视频,联合预测静态、动态和相机姿态焦点信息,提升动态nerf鲁棒性
[NeRF Relighting进展,SIGGRAPH] 浙大、微软亚研院等提出从一组物体的无结构图片,使用阴影和高光hints进行NeRF重光照的模型
I3D 2023 Papers Session 1 - Neural Rendering and Image Warping
强烈推荐!国防科技大学OpenCV图像处理全套教程!终于有人将opencv讲透了!存下吧,比啃书好多了!机器视觉/人脸检测/计算机视觉/人工智能
[NeRF编辑] 腾讯Pixel Lab,上科大提出Neural Imposters,一种将四面体网格与隐式表达混合的方法,可以实现神经场的编辑和控制操作
ORB-SLAM2系统框架解读
[NeRF进展,风格化与重着色,NPR方向]东京大学使用一种新的Palette提取方法,使NeRF重着色可达到实时性能,实现NPR效果(EGSR 2022)
YOLOv8+PSMNet+Deepsort,实现目标检测、追踪和测距!
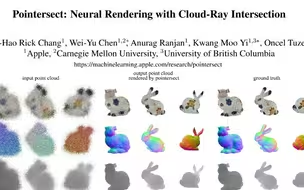
[点云+神经渲染进展] Apple, CMU, UBC提出Pointersect,给定一个点云,在不转换为其他表达的情况下,进行推理光线与表面相交性
[3D生成] 浙大、字节SIG 24工作Coin3D,使用粗糙模型三维控制,可控且交互地生成三维资产,提升导出带纹理网格的质量
r3live语义建图
[可泛化GS重建] 华中科技大学、南洋理工等提出MVSGaussian,一种从MVS快速的可泛化的GS重建方法,可以有效、通用地重建未见的场景,并达到实时渲染
膜拜!计算机大佬居然把目标检测YOLO系列最强两大算法:YOLOv5+YOLOv8讲解的如此通俗易懂!
视觉SLAM算法入门必备基础知识
斯坦福大学《没有工作的世界|ECON295 CS323 2024 A World Without Work, Daniel Susskind》中英(豆包
[NeRF进展,复杂场景编辑]斯坦福大学、Adobe提出PaletteNeRF,对复杂场景的外观属性进行后期编辑,NeRF向Adobe产品家族整合成为可能
[NeRF进展,效果提升] TUM与Meta推出GANeRF,使用GAN来解决视角观察缺陷以及小的光照变化带来的重建质量不佳问题,提升1.4dB以上
[Diffusion生成NeRF] TUM, Apple提出HyperDiffusion,用Diffusion计算神经场权重,统一框架下生成3D权重或4D动画
[NeRF App] Luma AI推出新APP:Flythroughs,unbounded场景通过iPhone即可完成建模和漫游,已经发布上线,可开放体验
[NeRF进展,带纹理的Mesh重建] 北京大学、百度提出NeRF2Mesh,优化现有Mesh重建方法,达到更好的Mesh效果、实时的渲染效果和后期处理能力
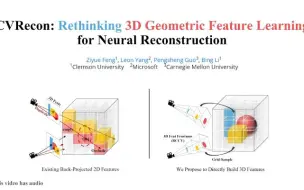
[3D特征] 克莱姆森大学,微软,CMU提出CVRecon,一个新的端到端 的3D神经重建框架,挖掘cost volume中的几何信息,提供了优质的3D特征
[群友SIGGRAPH工作] 上科大等推出DressCode,使用文本生成真实感服装,通过大语言模型交互生成CG友好的服装
比啃书高效!清华博士高翔:【视觉slam基础知识从理论到实践】视频教程
视觉SLAM特征点法与直接法的区别是什么
[NeRF进展,快速非刚体NeRF数百倍提升]布伦瑞克工业大学,马克思普朗克计算研究所提出MoNeRF,将非刚体NeRF训练时间提升数百倍,渲染质量更好
托福网课『斯坦福大学』顶级托福课程~教你一个月托福上100+别再埋头刷题啦!!!!
[NeRF进展,Avatar实时生成] 苏黎世I联邦理工,普朗克研究所提出InstantAvatar,相比SOTA方法速度提升130倍以上,秒级别训练,实时渲染
TUM AI Lecture Series - Ben Poole(Google Brain)基于2D先验的3D生成方法(2023.07.18)
搞SLAM算法为什么要学李群和李代数
[NeRF进展,镜头硬件参数校准] 康奈尔大学、Meta提出Neural Lens Modeling,在训练模型时同步优化相机参数,解决光学镜头参数校准问题
[NeRF+文本转3D] nVidia,多伦多大学Sanja团队:ATT3D,在一秒内使用文本生成3D的方法,极大提升了生成速度,并可完成简单的3D转换型动画
[NeRF进展,交互编辑方向] Inria, 马克斯普郞克学院提出NerfShop,使用基于Cage变形的方法进行物体的交互式选择与编辑,进一步推动实用