V
主页
具身智能机械臂实操入门课程-04(完):模型推理和抓取效果验证
发布人
WowRobo基于 Hugging Face 的 LeRobot 开源项目优化而成,助力具身智能教育,双臂均采用6自由度设计、韩国进口舵机及4096分辨率磁编码器,确保高精度与耐用性。本套免费实操入门课程,涵盖数据采集、模型训练与执行,欢迎关注和购买我们的硬件产品!
打开封面
下载高清视频
观看高清视频
视频下载器
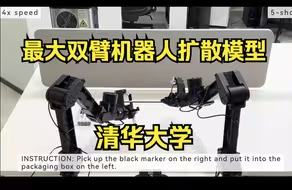
清华重磅开源RDT-1B:全球最大双臂机器人扩散基础模型
李飞飞团队佳作不断:聚焦机器人抓取交互,让机器人操作真正地适应各种环境
【up自制开源】30分钟拥有自己的具身智能触觉系统!柔性触觉不再遥不可及
Nvidia具身最新成果:GR00T-Control引领人形机器人智能控制
7x24监控你的电脑,老板看了都想装的AI神器!
Dobb·E 一个开源的家庭机器人操作臂端到端学习训练框架
灵巧手钢琴演奏 RoboPianist
AI新作|英伟达:人形机器人!全身控制模式无缝转换
保姆级手把手IsaacLab安装教程
星尘智能 Astribot S1 x Physical Intelligence π0
云深处发布托马斯回旋风火轮足机器人
【CoRL 2024论文】比Vision Pro更高效生成数据的远程操作系统
【Actuate 2024】中文字幕|机器人基础模型 - Robotic Foundation Models|Sergey Levine
PEGG-Net Isaac Sim Demo
dreamWaq复现尝试
具身智能机械臂实操入门课程-01:软件环境配置和双臂标定
[lerobot]使用模仿学习来训练神经网络,让机器人能够自主操作并完成现实世界的任务
【机器人科学III】让机器人拥有类人触觉感知,哥伦比亚大学机器人实验室最新进展
右边两足走路也是双足行走
利用大语言模型增强机器人导航(ReMEmbR)
我们是如何实现直膝行走的?
【揭秘】五指灵巧手DexHand021 产线组装的秘密
11月新品上线 | 随从臂“眼在手上”整机版本&夹爪摄像头组件重磅推出!
具身智能机械臂实操入门课程-03:机械臂的数据集录制与模型训练
ARX方舟无限 |现场展示一镜到底
【Stable Diffusion】5款超绝涩涩大模型推荐 ,绝对好用!绅士都在用的SD大模型 新手小白必备 福利大放送!(附资料)
RLBench官方教程1——界面和代码框架介绍
测试行走站立切换和站立抗冲击
如何神金地关一盏灯?Scratch:神经。
科研案例|基于 PyBullet 的具身智能软硬件平台 BestMan
【Tokyo Robotics】人形机器人Torobo通过深度预测学习掌握擦桌子技能
小鹏AI人形机器人Iron亮相:62个主动自由度,搭载自研AI芯片和灵巧手,已进厂打工!
太好了,是AI,我们有救了,大模型自动刷《崩铁》
Diffusion Policy 结合 PPO 模仿+强化 (下)
ICRA秦通新作!基于IPM的视觉泊车神经占用网格图
奔跑有点难度,步态很抽象,大佬们有没有什么好建议
[搬] 稳健的类人机器人行走-通过强化学习增强基于模型的控制
使用Isaac Sim和ROS2实现大田农业机器人
Meta开源视觉触觉感知方案
WowRobo首秀:基于Hugging Face LeRobot的具身智能教育机械臂