V
主页
4.1 ROS2的数字孪生
发布人
描述 机器人和 ROS 2 – 边做边学!Manipulators 是一门基于项目的机器人和机器人操作系统 (ROS) 第 2 版培训课程,由 Udemy Academy 出版。在课程过程中,您将设计一个机械臂。设计的机器人将配备不同的控制系统,用户将能够通过说话来控制机器人。本课程采用实践教育方法。这些方法强调学习是一个积极和互动的过程,我们只在与环境互动时将真正有用的东西存储在脑海中。 ROS的几乎所有功能和功能都将从理论和实践的角度进行讨论,本课程是Udemy最好的课程之一。该操作系统的每
打开封面
下载高清视频
观看高清视频
视频下载器
4.2 ROS2的数字孪生
9.2 在ROS2中建立机器人
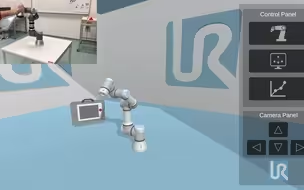
Unity3D 工业机器人 - 优傲机器人 UR3(数字孪生应用程序)
3.2什么是ROS2
工业 4.0 单元 - 数字孪生(Unity3d 和 NVIDIA PhysX)
4.13.软PLC编程(一)
4.2 编程可视化
第13章-轮式移动机器人-第2部分,共2部分
欧姆龙全家桶visual components数字孪生
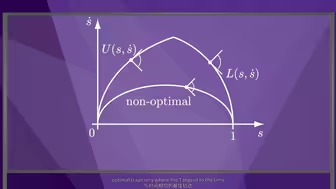
16-前馈控制
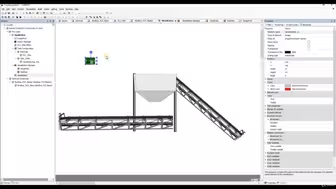
4.输送机扁平皮带数字孪生
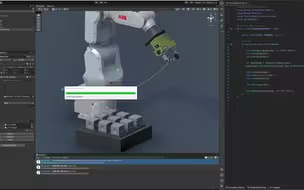
ABB数字孪生的编程实践
6台机械臂的同步控制
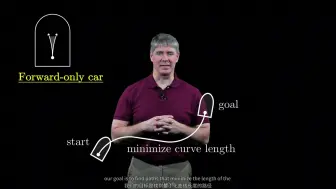
第9章-轨迹生成-第1部分,共2部分
2.2.可视化模拟控制
第9章-轨迹生成-第2部分,共2部分
8.笛卡尔机器人数字孪生
第12章-抓取和操作-第2部分,共2部分
1.第1节入门
第12章-抓取和操作-第1部分,共2部分
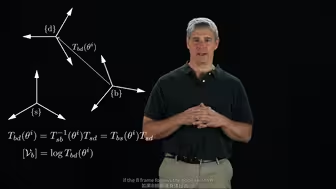
第4章-正向运动学
第10章-运动计划-第2部分,共2部分
1 _现代机器人简介
02 _第2章-配置空间-第1部分-共2部分
章-6-反向运动学
6.额外的配套讲座
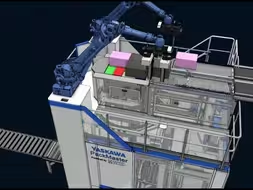
188 NVIDIA Omnivers的工业机器人数字孪生方案
195 西门子和vc链接数字孪生调试方案
125期双机器人码垛数字孪生仿真
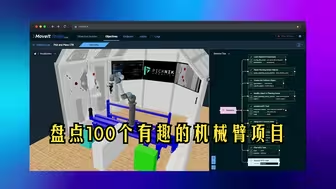
一个AI机械臂的训练平台
(开源)哪吒ROS2 -基础使用--代码组织架构 >> NeZha_Mini ROS2 学习教程(旭日派、视觉A
unity的c#编程方法
强化学习在ROS2中实现巡线小车
工业机器人末端夹具系列
《ROS2 机器人操作系统》实验一:ROS2 的安装
121期新能源电池涂胶装配
02 _第2章-配置空间-第2部分-共2部分
工业机器人末端快换的原理
122期啤酒厂包装线体仿真
5.2 硬件L电气屏演示