V
主页
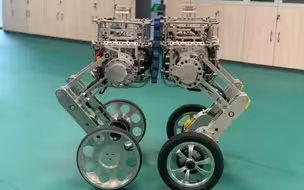
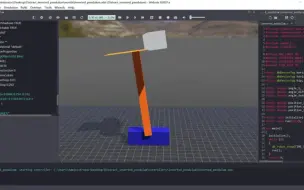
Point-Foot Bipedal Robot Based on Reaction Wheel and Closed-Chain Four-Link Leg
发布人
基于反作用轮和闭链四连杆腿的点足式双足机器人控制系统研究
打开封面
下载高清视频
观看高清视频
视频下载器
Handle Robot ?
Webots仿真SolidWorks模型导入仿真
四级倒立摆LQR控制——C语言Webots仿真四阶倒立摆(Four-Link Inverted Pendulum System)
双足轮机器人LQR控制——C语言Webots仿真轮腿式双轮足机器人(WLHR, Wheel-Leged Hybrid Robot)双足双轮双足
Bipedal Wheel-Legged Robot with Direct-Drive Wheel: Design and Experiments
仿迪士尼双足机器人,mini版,高约35cm
两轮平衡车LQR控制仿真——Webots C语言(TWSBV, Two-Wheeled Self-Balancing Vehicle)
C语言二次规划QP算法及MPC模型预测控制算法应用于二级倒立摆Webots仿真模型
Bipedal Robot Locomotion System
五级倒立摆LQR控制——C语言Webots仿真五阶倒立摆(Five-Link Inverted Pendulum System)
We're gonna start off nice and easy, see if 10% thrust capacity achieve lift.
Webots仿真Cubli一维动量倒立摆控制系统
Webots仿真ABB多关节并联结构工业机器人
H723 Actuator Stage III: Torque Control Capacity Test
VM视觉与三菱PLC通讯 实现引导 运动控制
简化平衡步兵LQR控制Webots仿真C语言——带平台的两轮平衡车
VR对战机器人失控暴走!软弹被替换成钢珠、刀片!现实世界血腥杀戮!《Evolver》虚拟实境战斗者!
Cubli单点平衡方块单点站立立方体Webots C语言控制仿真
太空人和音乐机器人战斗啦,这也太好玩啦!
(熬夜加更)30分钟带你搞定高一期中物理计算题
摄像人 第9季马桶人VS监控人系列人仔 。5-12岁男孩益智积木儿童玩具公仔,国产积木非乐高
Webots下肢二连杆的反演控制——C语言实现Backstepping反步控制
钢铁侠广工分侠
Hi朋友们#无机杀手#机器人#拟人
Webots RMUC 场地环境仿真(RMUC, RoboMaster University Championship)
Replaceable Modularized FOC Actuator H723 from Watson Dynamics (HT04)
宇树狗儿 新增功能〖跳跃跑〗
中国制造 | 非常能跑的机器人 星动STAR1 | 人形机器人 | 人工智能机器人
帮助截瘫患者 | 站立行走的 | 外骨骼机器人 WalkON | 人工智能机器人
三菱FX3U-1PG定位模块(共24课)
Navigation2之自定义插件
Webots倒立摆MPC控制——C语言模型预测控制二次规划QP算法 Model Predictive Control Quadratic Programming
[自制]手搓双足机器人样机demo|model-based控制|落后轻喷
不超8万元的 | 半人形双足机器人 Berkeley Humanoid | 人工智能机器人 | 宇树科技 | 机器人G1 |
Webots一阶直线倒立摆LQR控制仿真(IPS, Inverted Pendulum System)
Webots一阶直线倒立摆PID控制仿真(IPS, Inverted Pendulum System)
Webots二级倒立摆MPC控制——C语言实现二次规划QP算法及MPC模型预测控制算法
开源控制器Baselinewalkingcontroller:双足机器人平地动态行走
轮腿机器人主结构差不多做好了,接下来就是画板子写bug了
In-Wheel Motor Controller