V
主页
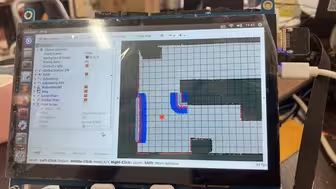
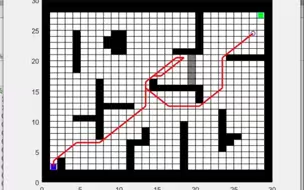
复杂环境下的实时路径规划
发布人
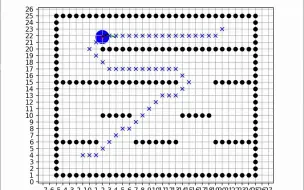
修修补补终于能够满足想要的要求了 地图大小:20m*25m 障碍物密度:0.16 个障碍物/m^2 机器人的行使轨迹颜色越红速度越快,越蓝速度越慢
打开封面
下载高清视频
观看高清视频
视频下载器
二维地图下基于安全走廊的优化轨迹生成
【轨迹优化】移植一下,参数还没调好,平均速度5ms左右
A*+DWA路径规划
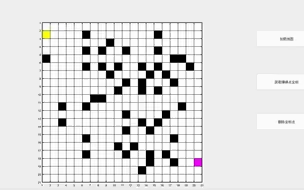
路径规划第一弹,栅格地图生成
【ROS】使用Gmapping算法建图与A*路径规划算法导航的智能小车,GUI界面显示
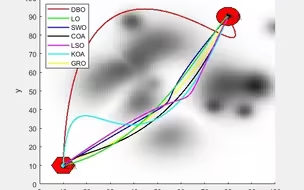
(四)七种优化算法求解无人机路径规划MATLAB
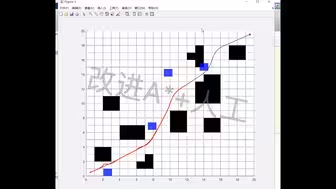
改进A星融合人工势场进行动态路径规划
路径规划算法大全,我会把市面上有的算法都收集放在群里面。关注我,才有动力更新,要资料看up主页
改进混合A* + MPC轨迹优化 + 轨迹跟踪(纯跟踪 + PID)
路径规划算法 A*和人工势场融合 动态路径规划
gazebo仿真ros小车路径规划与避障
开源!ROS C++实现的NMPC和LMPC轨迹跟踪
中科大新发布|轻量级神经路径规划,高效、低成本的机器人导航方法!
ROS 路径规划中,绘制固定路经
ros 路径规划 全局采用固定路径,局部采用纯跟随算法(RPP)
路径规划第二弹,宽度优先搜索
移动机器人局部轨迹规划
未知环境下的前端路径搜索+后端轨迹优化
基于安全走廊的路径轨迹生成(搞了个大的环境)
利用Path工具快速进行agv路径规划
hybrid A*路径规划,加上了纯跟踪控制
安全走廊的轨迹优化 上车 (7.4更新)
不是吧,学长,这个速度路径都能跑飞
滑动地图+JPS搜索+凸分解
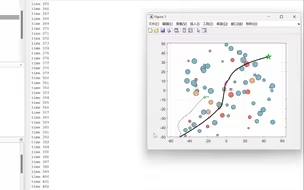
前端JPS 后端梯度下降
路径规划第三弹 A*算法
路径规划matlab全集
D* Dstar 路径规划 未知突然出现障碍物 动态规划规划
安全走廊用于构建避障约束
全中国搞路径规划的研究生都进来看!不仅对路径规划,我们也要对心规划!
基于深度强化学习(Deep Reinforcement Learning)的移动无人车自动路径规划MATLAB
JPS+梯度下降+安全走廊约束
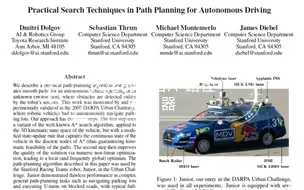
【附C++源代码】Hybrid A Star(混合A星)算法实现,考虑车辆运动学约束的路径规划算法
聚类 + 循迹 + 避障 + 路线跟踪
我的毕设演示:基于激光雷达的智能巡检小车
【Python】路径规划——姿态规划
SLAM建图&基于目标检测的自主导航【松灵小车任务四】
混合A*路径规划器,膜拜,分享论文及代码纯Python
路径规划
具备避让机器人功能的多机器人集群路径规划