V
主页
深度学习系列教程|07训练自己的数据集及在ROS端使用
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
深度学习系列教程|06训练环境搭建和制作自己的数据集
ROS入门系列教程(一)——工作空间与功能包(WHEELTEC)
ROS入门系列教程(三)——ROS话题(WHEELTEC)
ROS 2D导航原理系列教程合集(WHEELTEC)
深度学习系列教程|02通用物体识别与手势控制小车
深度学习系列教程|04深度学习沙盘地图自动驾驶——功能详解
ROS 2D导航原理系列(五)|全局路径规划-Astar
基于深度学习与ROS的路况模拟自动驾驶展示|Yolo&darknet
ROS入门系列教程(五)——ROS传感器介绍(WHEELTEC)
ROS入门系列教程(六)——rqt可视化工具集(WHEELTEC)
ROS入门系列教程(二)——launch文件与参数服务器(WHEELTEC)
ROS 2D导航原理系列(七)|局部路径规划-TEB算法
【目标追踪与姿态估计实战】迪哥半天就教会了我OpenPose算法!原理详解+项目实战,究极通俗易懂!(人工智能/AI/计算机视觉/深度学习)
ROS入门系列教程(八)——TF坐标变换(WHEELTEC)
【2024最全实战项目】100个PyTorch练手项目合集,学习计算机深度学习必备,练完即可毕业,练手项目~项目经验~毕设/课设
ROS阿克曼系列机器人功能演示(WHEELTEC)
ROS 2D导航原理系列(四)|全局路径规划-Dijkstra算法
手把手教你如何通过STM32与N10激光雷达实现小车避障
深度学习系列教程|03深度学习沙盘地图自动驾驶——功能介绍
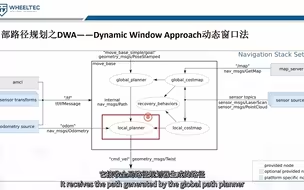
ROS 2D导航原理系列(六)|局部路径规划-DWA算法
Maya最受欢迎的三大插件,你有几个?
深度学习系列教程|05深度学习沙盘地图自动驾驶——功能演示
手把手教你如何通过STM32与N10激光雷达实现小车跟随
ROS2功能系列视频教程 (八)| ROS2视觉巡线
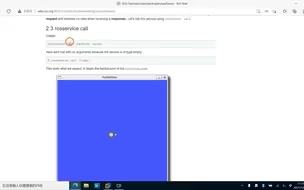
通过英文ROS wiki快速入门ROS教程(七)|使用ROS-tutorials学习服务与参数
ROS Moveit桌面机械臂进阶视频教程(四)|Move_Group_Interface C++部分函数讲解
ROS2功能系列视频教程 (一)| ROS2小车上手操作
我TM吹爆!这才是B站最系统的transformer!中科院大佬亲讲200集,全程干货满满!学不会自我反省!(自然语言处理/深度学习/神经网络/ChatGPT)
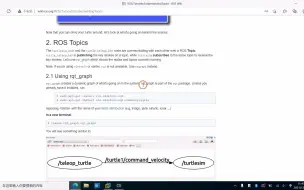
通过英文ROS wiki快速入门ROS教程(六)|使用ROS-tutorials学习话题
最新模块及注意力机制缝合教程,十分钟掌握缝合多种模块!深度学习/创新点
ROS2功能系列视频教程 (四)| ROS2 slam-toolbox建图
ROS教育机器人功能演示(WHEELTEC)
吹爆!人工智能从入门到精通:Python基础+数学基础机器学习+深度学习+强化学习,涵盖所有基础知识及项目实战,AI新手必备!
口碑NO.1!给想学LLM大模型的人安利一个神仙教程,带你一步步从零构建自己的大模型!-神经网络/深度学习/大语言模型
ROS2功能系列视频教程 (十一)| ROS2 USB手柄控制
图像分割、目标检测、特征提取、边缘检测、图像滤波、人脸识别,这绝对是B站最适合入门学习的OpenCV计算机视觉课程!从入门到图像处理实战!人工智能丨深度学习丨
ROS Moveit桌面机械臂进阶视频教程(一)|Urdf标签讲解
激光SLAM的入门讲解视频教程(一)|SLAM简介
ROS Moveit!机械臂小车功能演示(WHEELTEC)
ROS2功能系列视频教程 (六)| ROS2 2D导航