V
主页
激光SLAM的入门讲解视频教程(一)|SLAM简介
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
激光SLAM的入门讲解视频教程(二)|SLAM实现方向及其拓展
激光SLAM的入门讲解视频教程(三)|liosam原理框架讲解
激光SLAM的入门讲解视频教程(四)|liosam工程实现和代码模块讲解(上)
激光SLAM的入门讲解视频教程(五)|liosam工程实现和代码模块讲解(下)
通过英文ROS wiki快速入门ROS教程(一)|ROS wiki简介
SIGGRAPH'2024|RTG-SLAM:基于3DGS的大尺度场景实时三维重建-上篇
ROS入门系列教程|WHEELTEC
手把手教你如何通过STM32与N10激光雷达实现小车避障
ROS入门系列教程(四)——如何把ROS和STM32联系起来(WHEELTEC)
什么是SLAM?一个小时即可带你入门,从理论到实战,不到五个小时就能搞定,跟着大佬一起嗑代码,太上头了!—视觉slam、计算机视觉、视觉slam实战、自动驾驶
DoGaussian:分布式训练3DGS,速度提升6倍以上,高质量渲染-上篇
ROS入门系列教程(一)——工作空间与功能包(WHEELTEC)
ROS入门系列教程(三)——ROS话题(WHEELTEC)
ROS入门系列教程(二)——launch文件与参数服务器(WHEELTEC)
研究生必学!目前B站最好的【三维重建】教程,15小时深入浅出SfM与SLAM核心算法!计算机视觉3D三维重建/摄像机几何/多视图几何
ROS 2D导航原理系列教程合集(WHEELTEC)
纯视觉系统和激光雷达哪个好?迪哥精讲基于纯视觉系统的无人驾驶算法,论文解读+项目实战
【较真系列】讲人话-3d gaussian splatting全解(原理+代码+公式)【1】 捏雪球
【学习记录】3dgs几何精度:详解GOF、GaussianSurfel
手把手教你如何通过STM32与N10激光雷达实现小车跟随
ROS入门系列教程(五)——ROS传感器介绍(WHEELTEC)
ROS入门系列教程(六)——rqt可视化工具集(WHEELTEC)
【学习记录】3dgs几何精度六月进展,最新sota算法PGSR,gof延伸研究RaDe-GS
ROS Moveit桌面机械臂进阶视频教程(五)|Moveit_Config参数讲解第一部分
【学习记录】3DGS滤波器:mipsplatting,MS-GS,SA-GS,RAIN-GS
WHEELTEC推出新品镭神智能16线激光雷达C16
ROS Moveit桌面机械臂进阶视频教程(一)|Urdf标签讲解
ROS Moveit桌面机械臂进阶视频教程(七)|IKfast配置讲解第一部分
远超所有SOTA!ETH最新4DGF结合3DGS和NeRF速度还能加速200倍!
最新开源MVSGaussian:基于多视角 立体图像的快速通用高斯溅射重建 训练提速13倍,渲染300+FPS
ROS入门系列教程(八)——TF坐标变换(WHEELTEC)
从零开始实现一个球平衡机器人(附源码讲解)
如何使用全景相机去做gaussian splatting 教程1(vismap 篇)
深度学习系列教程|01深度学习和yolov3简介
ROS Moveit桌面机械臂进阶视频教程(八)|IKfast配置讲解第二部分
深度学习系列教程|06训练环境搭建和制作自己的数据集
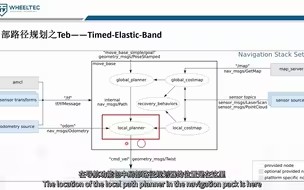
ROS 2D导航原理系列(七)|局部路径规划-TEB算法
【较真系列】讲人话-3d gaussian splatting全解(原理+代码+公式)【4】 高性能渲染与机器学习
ROS Moveit桌面机械臂进阶视频教程(二)|Moveit_Setup_Assistant配置讲解
【激光SLAM专题】LOAM代码如何学习