V
主页
第一章 快速上手教程 6.遥控器固件烧写
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
第一章 快速上手教程 1.开机测试及硬件资源介绍 (飞机、遥控、cocobit)-1
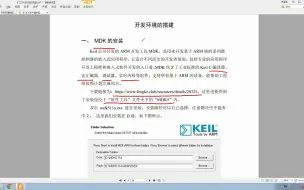
第一章 快速上手教程 3.开发环境搭建
第一章 快速上手教程 7.地面站上位机的使用与介绍
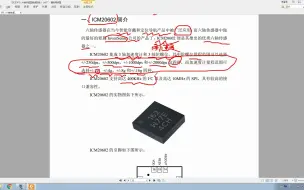
第二章 飞控开发基础篇 6.SPI(六轴传感器数据获取)
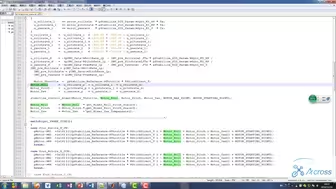
第四章 飞控开发高级篇 1.飞控整机代码走读、编译与烧写
飞控 Betaflight 简介,无人机开发实践 - 第 3 期 RISC-V Linux 系统开发公开课
第三章 遥控器开发实战教程 4.SPI(OLED显示屏)
第三章 遥控器开发实战教程 2.中断(按键检测)
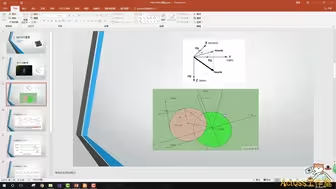
第四章 飞控开发高级篇 3.定高、定点、悬停(从解锁开始讲流程)
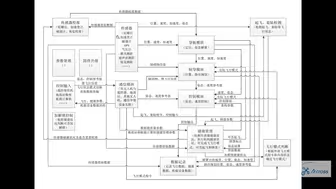
01 飞控软件概要
F04 自制火箭系列-飞控代码模块-LORA天地通讯
第二章 飞控开发基础篇 9.PWM(电机控制)
第一章 入门篇 1.MTK开发之环境配置
第二章 飞控开发基础篇 7.SPI(气压计数据获取)
第一章 快速上手篇2.CC3200_开发环境搭建
第三章 遥控器开发实战教程 5.SPI(2.4G双机通信)
疯壳AI开源编队无人机cocofly开发实战课程 1-5 遥控器固件烧写
第二章 飞控开发基础篇 4.串口(光流数据获取)
疯壳AI开源编队无人机cocofly开发实战课程 1-4飞控固件烧写
19 姿态估计的C代码实现
07 数据预处理-IMU数据滤波_2
第一章 快速上手篇 1.系统测试
09 数据处理-地磁数据
第二章 飞控开发基础篇 8.I2C(激光测距)
第二章 飞控开发基础篇 3.串口(基础收发)
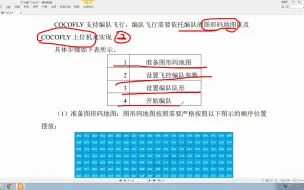
第四章 飞控开发高级篇 7.编队飞行 (整体实现流程)
第一章 快速上手篇3.CC3200_开发软件的使用
3.2 飞控算法基础之PID控制_2
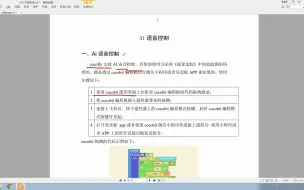
第四章 飞控开发高级篇 6.AI语音控制(语音控制飞机启停、翻滚、追踪等)
8.1 hmc5883介绍
第一章 快速上手篇1.CC3200_整板测试
第一章 快速上手篇1.整板测试
第一章 HarmonyOS入门1.应用及驱动开发快速体验
INAV OSD参数详解
10 姿态解算_1
第一章 C语言基础知识1.开发环境搭建
光敏传感器
06 数据预处理-IMU数据滤波_1
14 姿态解算_5
第一章 需求分析1.整机测试及需求分析