V
主页
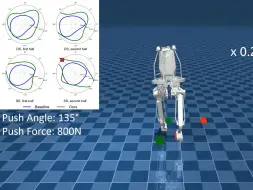
控制频率对基于深度 RL 的双足机器人运动扭矩控制器的影响
发布人
动态机器人系统实验室 http://dyros.snu.ac.kr/ 首尔国立大学 融合科学与技术研究生院(GSCST) 朴在兴教授 #Dyros #机器人 #SNU
打开封面
下载高清视频
观看高清视频
视频下载器
1小时我居然就搞懂了深度强化学习DQN算法及训练!DQN改进与应用技巧,运用神经网络来近似Q值函数,使算法能够在高维状态下运行,深度学习
斯坦福开源 - 机器人技能学习 通用接口UMI - 机械夹爪装配教程
灵宝CASBOT人形机器人产品发布会全程回放
保姆级手把手IsaacLab安装教程
[搬] 稳健的类人机器人行走-通过强化学习增强基于模型的控制
MIT 机器人讲座 —— MuJoCo MPC (MJPC) 介绍
ETHZ 研究:RL + 基于模型的控制: 利用按需最优控制学习灵活四足运动
UIUC 机器人讲座 —— 机器人学习:通过理解第一视角视频(Robot Learning by Understanding Egocentric Video)
人工智能这样学!同济大佬三小时带你轻松掌握【强化学习】入门及实战,全程大白话讲解,主打一个通俗易懂!
ETH + Oxford 四足机器人研究 —— 野外视觉导航的快速可穿越性估计
CMU 最优控制 2024 助教补充 第 7 讲
英国博主:中国将欧美科幻电影变成了现实
AI奇点说 | 第九期:未来走进现实,机器人开始“上岗”你准备好了吗?
ETH 讲座 —— 机器人的感知和学习:ML 最佳实践项目
EPFL 机器人研究 —— 视觉CPG-RL: 学习视觉引导的四足机器人运动CPG(ICRA 2024)
我居然半天就学会了八大深度神经网络:CNN、RNN、GAN、LSTM、DQN、GNN、MLP、transformer算法原理及项目实战!时间序列预测、图像识别
实时最优控制讲座 —— TrajectoryOptimization.jl 教程
多伦多大学航空航天研究所 CMake 教程 Lecture 1-Part2
听说听懂的人已经疯了,量子纠缠的真相竟是世界是虚拟的
开源机器人灵巧手(Jetson Nano)教程
CMU 机器人讲座 —— 机器人系统的鲁棒和松弛时态逻辑规划
强推!这可能是B站最系统的(Python+机器学习+深度学习)系列课程了,上海交大和腾讯联合出品!人工智能|神经网络|AI
树莓派5 VS Intel N100
2024 斯坦福 凸优化教程 Stephen Boyd 第 6 讲
CoRL 讲座 - 为真实世界的部署制定仿真基准
【新游戏电台】QA特别篇:专访温铁军,温老师如何看美国总统大选,数字货币,人工智能等时事热点问题
【B站最详细FLUX模型教程】这绝对是最全面最详细的Flux使用说明书!2024最新保姆级教程!FLUX模型超详的全方位使用教学!(全面讲解+安装部署+实战教程
特斯拉 Optimus Gen 2 在日常生活中的应用
Stanford CS234 2024 Spring | 强化学习 | Reinforcement Learning
宾大 GRASP 讲座 —— 机器人中的具身人工智能
RT2 VoxPoser Mobile Aloha…哪条路线更好?
机器人仿真软件 MuJoCo replicate 元素
CMU 机器人讲座 —— 模仿学习(IRL)与从人类反馈中学习(RLHF)
CMU 最优控制 2024 第 17 讲 迭代学习控制(Iterative Learning Control)
移动机器人从研究到现实的应用(波士顿动力)
华为下场,盘点国产人形机器人4家核心公司
[搬] 在线 DNN 驱动的非线性 MPC,用于步幅调节的仿人机器人步行
太完整了!我居然3天时间就掌握了【机器学习+深度学习+强化学习+PyTorch】理论到实战,多亏了这个课程,绝对通俗易懂纯干货分享!
讲座 | HYPERmotion:结合语言模型实现人形机器人自主行为规划——意大利技术研究院(iit)博士生研究员王进
CoRL 讲座 —— 人工智能机器人在现实世界中的应用