V
主页
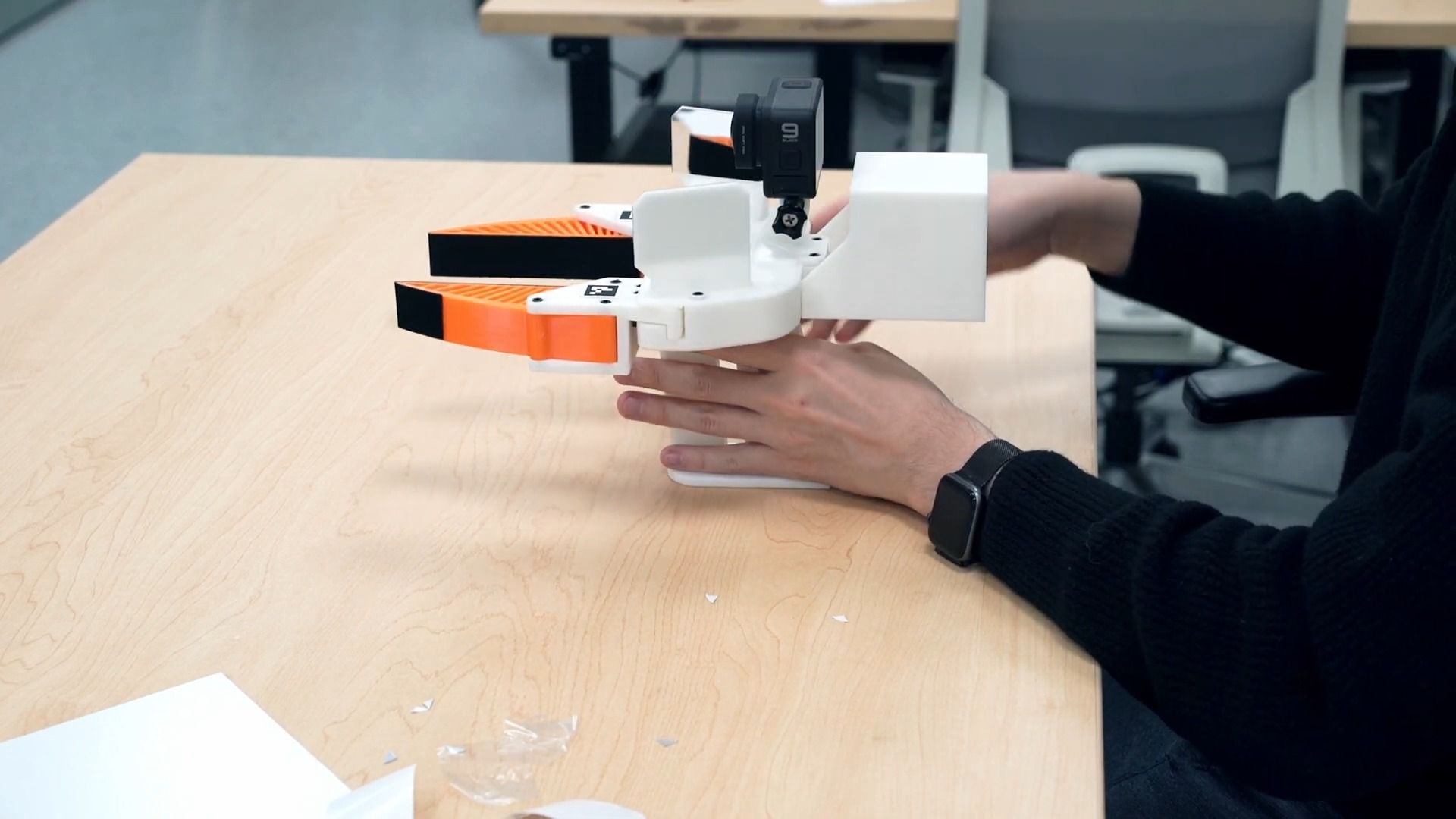
斯坦福开源 - 机器人技能学习 通用接口UMI - 机械夹爪装配教程
发布人
Universal Manipulation Interface: In-The-Wild Robot Teaching Without In-The-Wild Robots Project Webpage: https://umi-gripper.github.io Hardware Guide: https://docs.google.com/document/d/1T... UMI compatible GoPros: GoPro Hero9 (recommended for lower cost and energy efficiency): https://www.amazon.com/GoPro-HERO9-Bl... GoPro Hero10: https://www.amazon.com/GoPro-HERO10-B... GoPro Max Lens Mod 1.0: https://www.amazon.com/GoPro-Max-Lens... Amazon Links: MGN9C linear rail 150mm: https://www.amazon.com/ReliaBot-Linea... Compression Spring 10mm ODx0.7mm wire size x 50mm free lenght: https://www.amazon.com/gp/product/B09... M3 screws set: https://www.amazon.com/Kadrick-Assort... Super lube: https://www.amazon.com/Super-Lube-210... 3M TB641 grip tape: https://www.amazon.com/gp/product/B00... Stick-on mirror: https://www.amazon.com/gp/product/B01... 0:00 - Intro 0:08 - Required parts for gripper 0:30 - Dual-carrage linear rail 1:33 - Install linear rail and baseplate 2:47 - Install hand grip 5:39 - Install finger holders 8:31 - Install gears and linkages 9:27 - Handle lubrication 11:08 - Install handle and spring 11:37 - Install top plate 13:58 - Install the cube (for balancing) 15:04 - Apply 3M grip tape 16:55 - Install soft fingers 20:53 - Required parts for touch-ups 21:45 - Apply finger tracking markers 25:42 - Install mirrors 29:07 - Install GoPro
打开封面
下载高清视频
观看高清视频
视频下载器
斯坦福大学开源 - 机器人技能学习 通用操作接口 UMI (Universal Manipulation Interface) Demo
斯坦福机器人讲座 —— 机器人技能获取: 策略表示和数据生成
EPFL 四足机器人研究 —— ManyQuadrupeds: 多种类四足机器人学习运动策略(ICRA 2024)
ETH + Oxford 四足机器人研究 —— 野外视觉导航的快速可穿越性估计
CMU 机器人讲座 —— 构建适应性强的通用机器人
Lec8-1: Mujoco Tutorial- 仿真原理,核心模块,与机器人仿真器
斯坦福大学 —— 机器人与具身人工智能实验室
【Actuate 2024】中文字幕|机器人基础模型 - Robotic Foundation Models|Sergey Levine
开源 机器人操作数据集 —— DROID: 大规模机器人操作数据集
CMU 机器人讲座 —— 面向大规模多智能体的智能规划(移动机器人,无人机)
保姆级手把手IsaacLab安装教程
ETHZ 四足机器人研究 —— 学习具有风险意识的运动(ICRA 2024)
Diffusion Policy 结合 PPO 模仿+强化 (下)
ETH 讲座 —— 机器人的感知和学习:ML 最佳实践项目
实时最优控制讲座 —— 最优控制机器人软件
具身智能机械臂实操入门课程-04(完):模型推理和抓取效果验证
[复现]基于RF-MPC模型预测的四足机器人动态运动Matlab仿真
具身智能机械臂实操入门课程-03:机械臂的数据集录制与模型训练
开源机器人灵巧手(Jetson Nano)教程
RLBench机器人模仿学习大规模测试框架——任务展示
太完整了!我居然3天时间就掌握了【机器学习+深度学习+强化学习+PyTorch】理论到实战,多亏了这个课程,绝对通俗易懂纯干货分享!
ETHZ 四足机器人研究 —— 利用 3D 表征 学习在狭窄空间行走
三菱电机研究 —— 自主机器人装配齿轮箱
用于控制、推理和学习的随机扩散
具身智能机械臂实操入门课程-02:相机选型、接线与代码调试
类 Sora 机器人基础模型 RFM-1:理解物理的世界模型
[CoRL]使用模仿引导强化学习实现基于视觉的敏捷飞行 | 2024 苏黎世大学
UCS 机器人研究 —— 无人机在动态环境中自主避免碰撞的安全感知技术
慢放详解 舵机3D打印人形机械手
足式运动和操作的实时最优控制 - Marco Hutter
CoRL 机器人讲座 —— 通向通用机器人之路
教程 —— 用于机器人的 Raspberry Pi 与 ROS2 开发设置
[搬] 稳健的类人机器人行走-通过强化学习增强基于模型的控制
实时最优控制讲座 —— TrajectoryOptimization.jl 教程
用 ROS 2 在 Isaac Sim 中驾驶自主移动机器人
[贴图技巧]-青苔怎么画?
基于模仿学习的机械臂复杂任务实验
听话的机器手演示视频
迪士尼机器人技术展示 —— Duke
波士顿动力 Atlas 通过 VR 遥操作清理