V
主页
京东 11.11 红包
基于ros2-humble的lio-sam的建图自动导航仿真
发布人
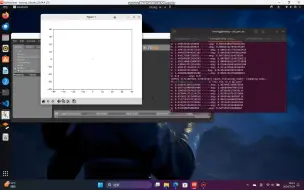
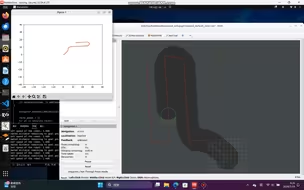
基于ros2-humble的自动导航系统,构建3Dslam,定位:gps,姿态:imu。导航及路径规划。
打开封面
下载高清视频
观看高清视频
视频下载器
农田农机路径规划(接入ros2和mapviz中发布路径)
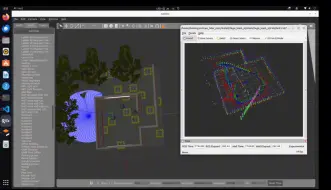
3D激光雷达建图ROS2humble仿真
ros2节点自定义纯追踪算法自动导航
自建gazebo世界实现基于RTK系统的动态路径跟踪导航
s型路径ros2的navigation2 自动导航仿真
基于NVIDIA Isaac Sim和LIO-SAM的激光SLAM demo
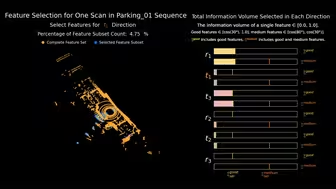
自定义3d点云构建2d地图算法
【SLAM】LoopSplats:通过直接的3DGS注册,实现密集建图和在线回环检测的全局一致性图优化
SLAM为什么需要IMU
火星上的SLAM 非结构环境中的飞行器建图和定位 太空机器人
mapviz部分插件展示效果
全覆盖路径规划算法pro版
A Compact LiDAR Odometry and Mapping with Dynamic Removal
Fast LIVO 硬同步过程释疑
无人驾驶建图定位ndt定位快速入门:部署、测试,全过程精细讲解(主讲录制人:严正清;技术小组:小组:陈云、贾岚博、刘志强、张连会)
轮式里程计激光里程计视觉里程计区别是什么
未知环境探索——ROS2树莓派小车实时地图构建和导航
从Navigation2开始的ROS2生活
SLAM算法三小时即可入门!计算机大佬十节课精讲让你从零到一快速掌握SLAM理论及无人驾驶实战!
SLAM-Viewer,SLAM便捷可视化小工具
港科技最新SLAM数据集!SLABIM:香港科技大学主楼SLAM-BIM耦合数据集
苹果发布单摄SLAM算法 轻量化眼镜要来了?
强推!【视觉SLAM十四讲】全书讲解!清华大学原著大佬高翔亲授!真的让人醍醐灌顶!——(人工智能、深度学习、神经网络、Pytorch、OpenAI开发者大会)
Go2开发教学10-SLAM 导航服务接口
DOM-60 为机器人带来前所未有的感知能力
这么简单好用的 ROS 定位方法,确定不要试一下吗?!
轮足机器人|平衡步兵静态障碍物导航避障
轮足机器人|平衡步兵动态障碍物导航避障
ChainSLAM实时建图演示
多传感器融合SLAM松耦合与紧耦合
动态环境中并行轨迹优化
Talk | 香港科技大学黄华健:高写实三维数字化时代下的在线同时定位和建图
【海克斯康RealSLAM10】即刻探索三维世界
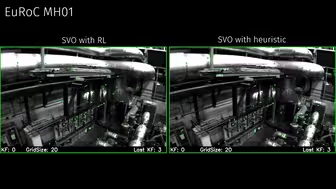
强化学习给视觉里程计自适应调参
为什么需要多传感器融合
FI-SLAM: Feature Information-Based Robust and Efficient Vision-Inertial-Aided Li
SLAM算法为什么需要内存管理机制
听劝不要轻易入坑SLAM
机器人多传感器融合
铰接式车辆的运动规划