V
主页
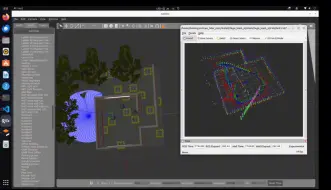
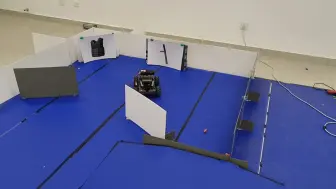
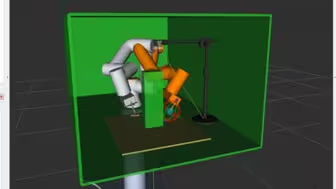
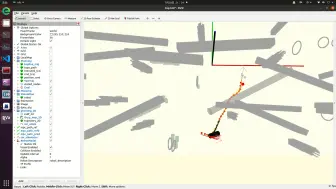
农田农机路径规划(接入ros2和mapviz中发布路径)
发布人
接入ros2和mapviz的农田路径规划,可以实现s型的覆盖路径,也可实现收割型的覆盖路径,只需要获取到田块边界的4点坐标或者经纬度。
打开封面
下载高清视频
观看高清视频
视频下载器
全覆盖路径规划算法pro版
路径规划|更平滑的Theta*算法(ROS C++/Python/Matlab)
3D激光雷达建图ROS2humble仿真
ros2节点自定义纯追踪算法自动导航
无需SLAM算法,直接生成Gazebo仿真环境对应的高质量真值地图的工具 pgm_map_creator,手把手逐步详细讲解安装部署和使用方法【开源】
s型路径ros2的navigation2 自动导航仿真
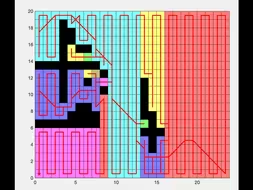
全覆盖路径规划 牛耕分区法 分区全覆盖 A*算法避障 Astar A星 路径规划 规则遍历覆盖
不是自主路径规划不会写 而是写死更有性价比
Navigation2:基础论文导读
基于六自由度机械臂避障的RRT轨迹+梯形速度规划算法
异构FPGA的HPS运行ROS2+路径规划,逻辑侧Drive-on-chip实现6轴机械臂控制
ROS仿真 移动机器人导航 路径规划 运动控制
[强化学习]自动驾驶路径规划与控制-DQN/DDPG+pure pursuit路径跟踪实现
桑塔纳的最后一舞
自动驾驶路径规划与控制-pure pursuit/PID/stanley控制实现
2024.7.2-保留障碍物建图
FR3仿真机+真机MoveIt路径规划 阿凯法奥ROS包(akai-fr-ros)
全新 JOHN DEERE S7 Combine 揭幕--动画展示 (英文)
(开源)最迷你的ROS2 机器人,自动路径规划、视觉识别、人体检测跟随、手势识别控制、多形态切换(想要资料评论区留言安排!)
家长必看!初中辅助线学习路径规划!
2D Fast-Planner
Qt/C++地图示例/添加折线多边形矩形圆形等/行政区域/点聚合/海量点/路径规划/绘制轨迹点
ROS MoveIt规划场景中添加虚拟墙
【交通大数据收费课程试看】使用“Mapbox”与“路径规划API"自动获取交通等时圈
2D Fast-Planner+MPC跟踪
初中数学学习目标规划,越早看到越早受益!
【顶刊复现】欠驱无人船轨迹跟踪+洋流扰动
【解码端到端】waymo规划篇1 learn-based pnc成果串讲
大麦收割 | 芬特(FENDT) IDEAL 8T
自主避障无人机3m/s测试【第二版控制器】
小麦收割 | CASE IH 7088 AXIAL FLOW
“高标准农田建设+N”投融建运管一体化
纽荷兰 CR11 试驾新型 XXL 联合收割机 工厂参观 Zedelgem CR10 农业
Yamabisu showroom japan带您参观阿吉家附近的农机装备店。
高标准农田改造:改善水利、土壤条件,发展现代农业,才是“高”
【JLPT】超详细备考规划| 四个月搞定日语N2 !拆分三个阶段四个专项备考|每天的学习都给你安排好了
5400万农田灌溉工程,关键时候不能用?这是如何做到全国统一的?
非洲荒地人工改造农田
大麦收割 | 克拉斯(Claas)Lexion 770
洋葱收获 | Fendt Vario 720+Lockwood 洋葱收割机