V
主页
日本先进院发布!GPU加速粒子滤波 6-Dof蒙特卡罗定位
发布人
本文提出了一种基于GPU加速的Stein粒子滤波的6-DoF距离蒙特卡罗定位方法。为了更新大量的粒子,我们提出了一种基于高斯-牛顿迭代邻域粒子搜索的Stein变分梯度下降算法( SVGD )。该方法利用SVGD对具有梯度和邻域信息的粒子状态进行集体更新,提供了高效的粒子采样。对于高效的邻居粒子搜索,它使用局部敏感哈希,并随着时间的推移迭代更新每个粒子的邻居列表。然后使用邻居列表在邻居粒子图上传播粒子的后验概率。所提出的方法能够在单个GPU上实时评估一百万个粒子,并且能够在没有初始位姿估计的情况下实现鲁棒的位姿初始化和重定位。在实验中,所提出的方法对完全传感器遮挡表现出极强的鲁棒性,并且能够在没有任何先验信息的情况下精确定位传感器位置。 文章名称:【MegaParticles: Range-based 6-DoF Monte Carlo Localization with GPU-Accelerated Stein Particle Filter】 作者单位:日本国家先进工业科学技术研究院 (AIST) 文章链接:https://arxiv.org/abs/2404.16370 项目主页:https://sites.google.com/view/meta-evolve
打开封面
下载高清视频
观看高清视频
视频下载器
【Neuro/Vedal】老父亲不让她养狗于是Neuro决定自己当狗
立体匹配算法原理与应用-奥比中光
外星族群:蜥蜴人控制世界!苏美尔雕像,莱瑟塔档案的证明!
10个地球上突然出现,又凭空消失的诡异物体!
手术缝合技术 up主缝合展示
太阳系有多大?其范围可能大到你无法想象,半径就有1光年!
水蛭走道的方式真的很特别
加州大学开源!城市空间中具身智能的仿真平台
SuperPoint和SuperGlue 的算法介绍及学习应用经验分享
请文明用语!百度在日本推出输入法新功能
苏黎世大学发布!无需状态估计的视觉像素敏捷飞行
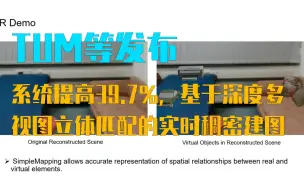
TUM&MCML发布|系统提高39.7%,基于深度多视图立体匹配的实时稠密建图!
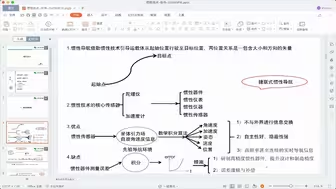
IMU选型、标定误差分析、AHRS组合导航
让AI把所有国家都变成士兵!
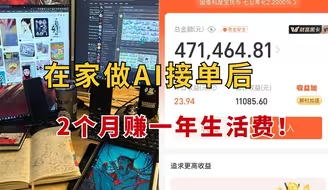
在家做AI,2月赚了一年生活费,分享我的实操方法,目前经济自由!!
【直播回放】SLAM常见面试问题浅析
【SLAM前沿讲座】特拉华大学|视觉惯性估计与感知
【Neuro开发回】小AI挑战过滤器,疯狂输出!
史上最小遥控车
无人机捉无人机!上演无人机界的老鹰捉小鸡!
机器人【孤勇者】“总有一天,全宇宙的机器人都要高看我”
AR眼镜销量全球第一! AR科技创业该如何商业化?看他怎么说
VR、外骨骼、脑机接口的完美结合丨虚拟现实中用于运动图像脑-机接口的手外骨骼
CMU & ICRA22 UGV大场景3D点云定位竞赛亚军技术方案分享|浙江大学
【SLAM前沿讲座】Tim Barfoot |机器学习在哪里可以帮助机器人进行状态估计?
浙大章国峰团队发布CP-SLAM: 协同基于神经点的SLAM
AR界面也能操控无人机了,只需用手轻轻一碰
在野生环境中投喂宠物大鱼
公开课 | 无人机实时及快速地图重建
【直播回放】专门用于自动驾驶的LiDAR惯导标定方案
走进AI,就找严习社
从0维空间到6维空间,每增加一个维度,都是对认知的考验!
深度揭秘火柴人VS几何中的四维怪物!
手把手带你入门SLAM
双目VIO+点线特征+抗动态光照! 南洋理工最新开源!
【最新开源】SIGGRAPH 2022|在线试衣?输入文本即可任意更换衣服搭配,太有用了!南洋理工&商汤等新工作
全网第一台!去浙江探访锐星光学巨型203APO天文望远镜
这个穿“高跟鞋”的机器人能走钢丝、玩滑板,还能飞!登上Science子刊!【机器人】
【直播回放】用于3D激光雷达SLAM闭环检测的词袋模型 BoW3D
7.4m/s相对速度自主规避,高效抵抗外部干扰!港大最新发布