V
主页
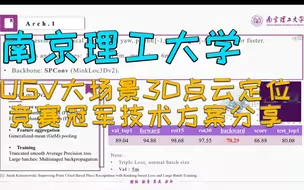
CMU & ICRA22 UGV大场景3D点云定位竞赛亚军技术方案分享|浙江大学
发布人
更多内容请进SLAM/3D视觉知识星球学习! 学习教程官网:cvlife.net 1、视觉SLAM:ORB-SLAM2(必学基础) 2、视觉惯性SLAM:ORB-SLAM3,VINS-Mono、VINS-Fusion 3、激光/多传感器融合SLAM:Cartographer,LeGO-LOAM、LIO-SAM、LVI-SAM 4、三维重建:视觉几何OpenMVS,深度学习重建MVSNet、PatchMatchNet、JDACS-MS 5、机器人运动规划:Navfn、Dijkstra、A-Star、DWA、TEB 6、相机标定:单目/鱼眼/双目/阵列
打开封面
下载高清视频
观看高清视频
视频下载器
CMU & ICRA22 UAV俯瞰视觉定位竞赛亚军技术方案分享|中国科学技术大学
CMU & ICRA22 UGV大场景3D点云定位竞赛冠军技术方案分享|南京理工大学
【开源】ICRA2022|CMU新工作,自主勘探开发环境与规划算法
哈工大博士分享:基于NeRF的SLAM技术发展与代表性开源算法介绍(上)
谷歌机器人子公司Intrinsic最新开源机器人抓取,无需收集数据或人工标注! ICRA 2022
武大最新开源:GNSS/INS组合导航开源代码KF-GINS详解
ICRA22 CMU机器人所讲座 | 机器人自主导航开发环境
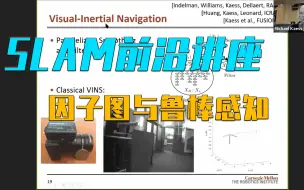
【SLAM前沿讲座】CMU|因子图与鲁棒感知
ECCV2022|任意两帧之间均可插入,可实现27倍视频加速处理!旷视等最新开源
【直播回放】专门用于自动驾驶的LiDAR惯导标定方案
【线下讲座】占云龙:SLAM技术发展与存在的问题
CMU最新发布|不同环境下机器狗的360°相机定位,能自动规避障碍物,快速又准确!
上海交通大学博士分享基于神经隐式表征的语义SLAM(下)
手把手带你入门SLAM
【直播回放】SLAM学习分享及交流心得-ORB-SLAM3
华科、华为联合开源!实时动态场景4D高斯泼溅,最高 82fps!
无GPS下,即可在杂乱的森林环境中自主飞行!宾大开源!
立体匹配算法原理与应用-奥比中光
ICRA22大牛直播回放 | 跨模态自/半监督的高效数据自主化
【线下讲座】高翔:大规模点云地图的并行计算与交互式优化
CMU等机构发布超强VSLAM数据集TartanAir,用于探索视觉SLAM极限!
听起来高深莫测的SLAM技术到底是啥?SLAM技术简介及入门方法
手把手教你学习标定基础知识
2021年度盘点:十大最佳开源SLAM算法!
香港大学开源FAST-LIO简介,对比及学习方法(附详细解读文档!)
深度学习特征实现机器人长期视觉定位,白天夜里什么光照都hold住!ICRA/RAL 2022
ICRA22 MIT SPARK主任 | 位置识别:鲁棒3D场景理解的挑战和机遇
ICRA22大牛直播回放 | 如何在270公里/小时的速度下制造出可靠鲁棒的自动驾驶汽车?
MIT等开源|实时构建3D场景图,机器人探索大规模环境的空间感知算法!
UCLA发布|基于稠密点云的快速定位,实时提供准确的姿态估计!
2022年度盘点:优秀SLAM开源方案
ICRA22亚马逊自动驾驶部 | Zoox自动驾驶系统的自动参数调整
ICRA22大牛直播回放 | 理解人类驾驶员对自动驾驶的交互行为
【直播回放】2022届秋招面试心路历程分享:SLAM方向
经验分享:我的SLAM学习之路-答疑交流
如何学习S-MSCKF,以下几点建议送给你!
收藏不亏!4个地方,可获得开放的激光雷达数据!
在家做AI,2月赚了一年生活费,分享我的实操方法,目前经济自由!!
多地图的作用和效果_7.2
CMU新开源|改进27.7%的误差,首个处理动态环境的监督学习VO方法!ICRA2023