V
主页
【直播回放】用于3D激光雷达SLAM闭环检测的词袋模型 BoW3D
发布人
剩余部分请进SLAM/3D视觉知识星球学习! 嘉宾简介: 崔芸阁,中科院沈阳自动化研究所在读博士,主要研究方向为视觉与3D激光雷达SLAM、三维重建。开源了用于实时的位置识别及6-DoF闭环矫正的LinK3D特征及基于LinK3D特征的词袋模型BoW3D算法,BoW3D已发表于机器人顶刊RA-L,相应的论文及代码地址 LinK3D: https://arxiv.org/pdf/2206.05927.pdf BoW3D: https://arxiv.org/pdf/2208.07473.pdf 开源代码地址: https://github.com/YungeCui/BoW3D
打开封面
下载高清视频
观看高清视频
视频下载器
太酷了!手持激光雷达,即可在线实时重建点云!牛津大学最新发布,可用于森林调查!
【直播回放】同济大学DL-SLOT详解!动态激光SLAM和目标追踪
苏黎世皇家理工等发布!带闭环稠密神经SLAM
ETHZ最新发布X-ICP 极端环境下鲁棒的激光雷达配准
【开源】UCLA提出轻量前端直接激光雷达里程计,针对弱算力平台!
收藏不亏!4个地方,可获得开放的激光雷达数据!
【直播回放】浙大ÐZ开源大型室内场景重建 NICE-SLAM 介绍(上)
1.2 如何快速学习开源代码?
Stereo Vision——立体视觉论述+标定+校正
无标记环境下高分辨率雷达和相机像素级外参自标定
香港理工最新开源|实时LiDAR定位与Mesh建图,首个基于CPU的实时激光雷达SLAM系统!
【直播回放】近期SLAM论文速览!干货满满!
波恩大学博士丨语义激光SLAM以及硕博课题开展
【开源】ICRA2022|基于激光雷达的终身地图构建和维护框架!
摄像机透视投影模型
研究生必学!目前B站最好的【三维重建】教程,15小时深入浅出SfM与SLAM核心算法!计算机视觉3D三维重建/摄像机几何/多视图几何
激光雷达是怎么工作的?为什么说无人驾驶离不开激光雷达
首个里程计+静止建图模式的系统!可自动无目标标定!南科大最新开源!
立体匹配算法原理与应用-奥比中光
【SLAM前沿讲座】CMU|用于触觉感知的因子图学习
港大等提出细铁丝网SLAM和三维重建!专治疑难杂症😎
【SLAM前沿讲座】多伦多大学|用于解锁视觉导航的动态相机
华科大最新工作分享:基于激光雷达-惯导-轮速计的联合状态估计!
【即将开源】DM-VIO:仅单个相机和IMU优于双目惯性方法!RA-L
1.4 ORB-SLAM2算法框架详解
【六哥答疑】入门视觉SLAM,需要了解什么框架?
CMU最新发布首个记忆增强的终身SLAM系统,源自大脑中记忆重放机制的启发!
手把手教你学习标定基础知识
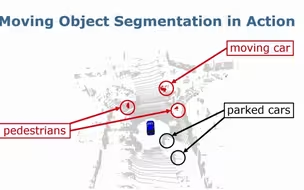
IROS 2021大牛团队最新开源!深度学习三维激光雷达动态物体分割
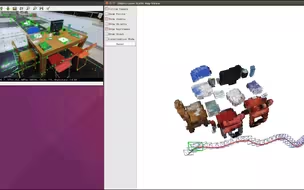
【前沿论文】中科大丨用于闭环的物体语义建图,IROS 2021
如何快速入门三维重建?应用场景、岗位要求及薪资、技术框架
学术大佬答疑解惑!关于语义激光SLAM,说不定有你想知道的!
这个多模态SLAM可实现任意传感器数量松耦合,在GPS、视觉传感器失效时仍稳如老狗!
【SLAM前沿讲座】TUM|深度网络直接法视觉SLAM
学习SLAM,必读哪些基础书籍?
2021年度盘点:十大最佳开源SLAM算法!
哈工大博士分享:基于Gaussian Splatting的SLAM新发展与新论文(上)
01-NeRF与SLAM结合的早期探索
加速道路资产盘点,灵光Lixel助力交通管理智能化| 手持激光雷达
二十多元静止感应雷达, 底噪自动检测功能更适合新手