V
主页
多地图的作用和效果_7.2
发布人
讲师: 小六:中科院博士、多年视觉SLAM从业经验、计算机视觉life公众号创始人。课程讲解细致,善于将复杂的原理用图表具象化,帮助学员快速理解复杂的源码并理解背后的物理意义,教学耐心仔细,广受学员好评。 老白:擅长视觉SLAM,VIO,以及多传感器融合,熟悉框架ORB-SLAM系列,4年工作经验,曾在自动驾驶高精度地图公司工作,目前就职于知名机器人公司。 ————————————————— 感兴趣的同学可以扫码片尾二维码添加工作人员,获取更多海量资料,还有高质量行业交流群哦~
打开封面
下载高清视频
观看高清视频
视频下载器
【六哥答疑】视觉SLAM目前效果最好的开源算法有哪些?
SLAM知识星球直播答疑及抽奖
SLAM初学者常问的几个问题
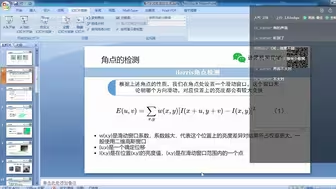
角点的提取、跟踪与筛选
经验分享:我的SLAM学习之路-答疑交流
【直播回放】2022届秋招面试心路历程分享:SLAM方向
牛津大学|这个IMU+四个相机的视觉惯性里程计真不错!漂移率降低80%、相对位姿误差降低39%!
苏黎世皇家理工等发布!带闭环稠密神经SLAM
为什么要学习ORB-SLAM2呢?
【直播回放】相机标定入门、探讨和思考
【直播回放】用于3D激光雷达SLAM闭环检测的词袋模型 BoW3D
2022年度盘点:优秀SLAM开源方案
港大等提出细铁丝网SLAM和三维重建!专治疑难杂症😎
复杂环境下,基于Lidar的无人机自主飞行!港大最新发布!
双目VIO+点线特征+抗动态光照! 南洋理工最新开源!
听起来高深莫测的SLAM技术到底是啥?SLAM技术简介及入门方法
【原创】初学者如何入门计算机视觉?思维导图一条龙路线规划,保姆级教程!
【原创】优秀开源代码盘点:稀疏视觉SLAM/SfM
1.4 ORB-SLAM2算法框架详解
【直播回放】专门用于自动驾驶的LiDAR惯导标定方案
动态SLAM论文综述讲解(含30+论文下载)!
极端环境下,雷达的3D自我运动规划,可实现真实的传感器部署!韩科院研究!
【最新技术】ANYmal C 机器人自主探索地下矿井
SIGGRAPH 2022|在线画家来了!输入文字即可快速生成艺术画,效果惊艳!
【最新开源】单目RGB视频就可重建出会动的4D仙人掌玩具!
【SLAM前沿讲座】生物启发SLAM:我们从哪里来,我们能去哪里?|昆士兰科技大学
一键即可改变,3D人脸实时编辑!清华&腾讯最新开源!
【六哥答疑】建立稠密地图的视觉SLAM,目前效果最好的开源算法有哪些?
无标记环境下高分辨率雷达和相机像素级外参自标定
摄像机透视投影模型
CMU & ICRA22 UAV俯瞰视觉定位竞赛亚军技术方案分享|中国科学技术大学
某屑妄图用scratch做3D我的世界
【直播回放】SLAM常见面试问题浅析
【六哥答疑】多传感器融合SLAM都有哪些框架?作为研究生课题研究方向如何?
机器人【孤勇者】“总有一天,全宇宙的机器人都要高看我”
【SLAM前沿讲座】佐治亚理工|用于感知和行动的因子图
60fps的速度捕获,头戴相机面部捕捉!
多视图头发编辑,可任意修改长度,适用于各种发型!波恩大学&CMU最新发布,ECCV2022
【线下讲座】史雪松:室内机器人系统的长期视觉定位与建图
【六哥答疑】VSLAM与深度学习结合,是不是更容易出成果?