V
主页
【直播回放】同济大学DL-SLOT详解!动态激光SLAM和目标追踪
发布人
嘉宾简介: 朱忠阳,硕士一年级,就读于同济大学智能无人车实验室(TIEV),师从赵君峤副教授(个人主页:cs1.tongji.edu.cn/~junqiao),本科毕业于同济大学汽车学院,主要研究方向为激光SLAM、激光惯导SLAM以及面向动态环境的SLAM。以共同一作身份投稿至IEEE Transactions on Intelligent Transportation Systems一篇文章:DL-SLOT,审稿中。 实验室曾在ITS、ICAR、IROS、RA-L等高水平刊物及会议上发表文章。
打开封面
下载高清视频
观看高清视频
视频下载器
1.2 如何快速学习开源代码?
【直播回放】用于3D激光雷达SLAM闭环检测的词袋模型 BoW3D
苏黎世皇家理工等发布!带闭环稠密神经SLAM
激光slam精度验证,强光环境地面点精度,RTK参数转换大地高转85高,精度验证
1.4 ORB-SLAM2算法框架详解
【直播回放】SLAM公司汇总
【直播回放】SLAM常见面试问题浅析
立体匹配算法原理与应用-奥比中光
听起来高深莫测的SLAM技术到底是啥?SLAM技术简介及入门方法
强推!【SLAM核心算法】中科院博士一口气带你学完无人驾驶:原理、激光、无人机、VR、传感器、计算机视觉!(人工智能、深度学习、机器学习、神经网络、图像处理)
【开源】ICRA2022|基于激光雷达的终身地图构建和维护框架!
【线下讲座】史雪松:室内机器人系统的长期视觉定位与建图
01-NeRF与SLAM结合的早期探索
牛津大学发布!可扩展激光雷达NeRF SLAM,时间节省一半!
香港理工最新开源|实时LiDAR定位与Mesh建图,首个基于CPU的实时激光雷达SLAM系统!
激光SLAM重定位视频1
【直播回放】学习大礼包
【最新技术】ANYmal C 机器人自主探索地下矿井
【直播回放】多目标追踪和跨镜头追踪的介绍、困境、策略、展望
公开课 | 无人机实时及快速地图重建
【线下讲座】苏赟:地面机器人多模态融合SLAM
ROS2用slam_toolbox建图,树莓派猪脑过载
MIT|仅用RGB相机作传感器,实时定位机器人!无需依赖初始姿势估计!
【SLAM前沿讲座】TUM|深度网络直接法视觉SLAM
哈工大博士分享:基于NeRF的SLAM技术发展与代表性开源算法介绍(上)
《松灵ROS 2开讲啦》第五期 ROS 2中常用的SLAM建图方法
双目VIO+点线特征+抗动态光照! 南洋理工最新开源!
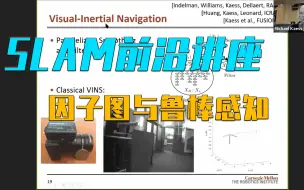
【SLAM前沿讲座】CMU|因子图与鲁棒感知
牛津大学|这个IMU+四个相机的视觉惯性里程计真不错!漂移率降低80%、相对位姿误差降低39%!
港大等提出细铁丝网SLAM和三维重建!专治疑难杂症😎
【六哥答疑】入门视觉SLAM,需要了解什么框架?
CMU & ICRA22 UAV俯瞰视觉定位竞赛亚军技术方案分享|中国科学技术大学
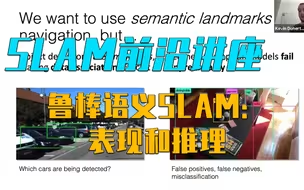
【SLAM前沿讲座】MIT|鲁棒语义SLAM:表现和推理
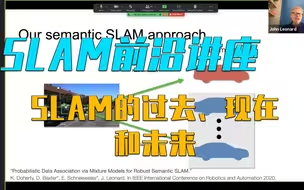
【SLAM前沿讲座】MIT|SLAM的过去、现在和未来
【直播回放】一个本科生从小白到菜鸟的SLAM进阶之路
CMU & ICRA 2022 SLAM竞赛介绍及交流 “UGV大场景3D点云定位”和“UAV俯瞰视觉定位”
【直播回放】浙大ÐZ开源大型室内场景重建 NICE-SLAM 介绍(下)
【直播回放】视觉惯性SLAM系统理论与实践(上)
【SLAM前沿讲座】佐治亚理工|用于感知和行动的因子图
摄像机透视投影模型