V
主页
【SLAM前沿讲座】MIT|SLAM的过去、现在和未来
发布人
https://www.youtube.com/watch?v=FH6suW6_A5U 学习教程官网:cvlife.net 1、视觉SLAM:ORB-SLAM2(必学基础) 2、视觉惯性SLAM:ORB-SLAM3,VINS-Mono、VINS-Fusion 3、激光/多传感器融合SLAM:Cartographer,LeGO-LOAM、LIO-SAM、LVI-SAM 4、三维重建:视觉几何OpenMVS,深度学习重建MVSNet、PatchMatchNet、JDACS-MS 5、机器人运动规划:Navfn、Dijkstra、A-Star、DWA、TEB 6、相机标定:单目/鱼眼/双目/阵列
打开封面
下载高清视频
观看高清视频
视频下载器
【SLAM前沿讲座】MIT|鲁棒语义SLAM:表现和推理
【SLAM前沿讲座】生物启发SLAM:我们从哪里来,我们能去哪里?|昆士兰科技大学
经验分享:我的SLAM学习之路-答疑交流
上海交通大学博士分享基于神经隐式表征的语义SLAM(下)
【SLAM前沿讲座】多伦多大学|用于解锁视觉导航的动态相机
【SLAM前沿讲座】Tim Barfoot |机器学习在哪里可以帮助机器人进行状态估计?
苏黎世皇家理工等发布!带闭环稠密神经SLAM
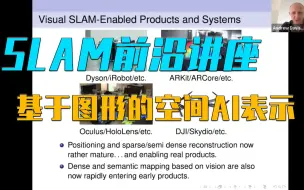
【SLAM前沿讲座】帝国理工学院|基于图形的空间AI表示
【线下讲座】占云龙:SLAM技术发展与存在的问题
CMU & ICRA 2022 SLAM竞赛介绍及交流 “UGV大场景3D点云定位”和“UAV俯瞰视觉定位”
瑞典皇家理工博士分享开源算法: 点云地图动态障碍物去除基准
听起来高深莫测的SLAM技术到底是啥?SLAM技术简介及入门方法
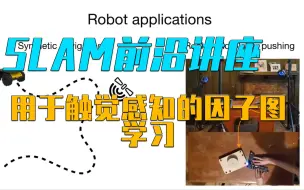
【SLAM前沿讲座】CMU|用于触觉感知的因子图学习
梁文道讲座:苏格拉底的申辩
我愿称之为2024年【计算机视觉与三维重建】入门天花板教程,北邮大佬用15个小时给它讲明白了,不愧是名校公开课!!!
武汉大学博士生分享算法面向室内SLAM场景的点云超分辨率算法(上)
窦桂梅品质讲座《如何依据新课标 用好现行教材》无锡市首届“思维进阶”名师活动 2023.10
强推!【SLAM核心算法】中科院博士一口气带你学完无人驾驶:原理、激光、无人机、VR、传感器、计算机视觉!(人工智能、深度学习、机器学习、神经网络、图像处理)
【直播回放】浙大ÐZ开源大型室内场景重建 NICE-SLAM 介绍(上)
ROS2用slam_toolbox建图,树莓派猪脑过载
手把手教你学习标定基础知识
《松灵ROS 2开讲啦》第五期 ROS 2中常用的SLAM建图方法
【直播回放】SLAM学习入门经验分享
【直播回放】SLAM常见面试问题浅析
学习SLAM,必读哪些基础书籍?
公开课 | 无人机实时及快速地图重建
SLAM学习及求职经验分享
牛津大学发布!可扩展激光雷达NeRF SLAM,时间节省一半!
复杂环境下,基于Lidar的无人机自主飞行!港大最新发布!
【直播分享】基于动态交互表征的灵巧手物体抓取过程学习(SIGGRAPH 2022)
MIT《Web开发速成课|MIT Web Development Crash Course 2024》中英字幕
ICRA 2022盘点:SLAM方向十大重点论文解读
《百年未有之大变局加速演进下 中国未来发展的前景》 北大 林毅夫
【直播回放】武汉大学开源SLAM详解!低成本轮式机器人定位算法 Wheel-INS
【直播回放】VINSMono+Fusion 论文详解
【六哥答疑】哪些相机比较适合做SLAM?
01-NeRF与SLAM结合的早期探索
【即将开源】DM-VIO:仅单个相机和IMU优于双目惯性方法!RA-L
【知识星球】SLAM星球漫游指南
【六哥答疑】多传感器融合SLAM如何开始研究呢?有哪些研究方向?