V
主页
MIT工作:Kimera,新的实时度量语义的开源SLAM系统(ICRA2020)
发布人
https://www.youtube.com/watch?v=-5XxXRABXJs 本文提供一个用于实时语义视觉-惯性同步定位和建图的开源C++库。该库超越了现有视觉和视觉惯性SLAM库(例如,ORB_SLAM, VINS-Mono, OKVIS, ROVIO),实现了基于三维网格重建和语义标记结果。简单说,SLAM+生成语义标签。具体效果请看视频! 注:另有同名微信公众号,欢迎点赞+关注!在公众号「3D视觉工坊」后台,回复「kimera」获取论文链接!
打开封面
下载高清视频
观看高清视频
视频下载器
SLAM里程碑!戴森机器人实验室最新开源:3D GS杀入SLAM!
我们训练了一个没有道德限制的大模型
被点醒了!想学好线代一定不能错过的《线性代数可视化手册》,求所有线代不好的把这12页纸翻烂!MIT大神级教授神书
代码开源!伦敦大学学院:DSP-SLAM:物体特征级SLAM
[IROS2021] TUPPer-Map:用于 3D 语义建图的时间和统一全景感知
为什么大学计算机全是深度学习?
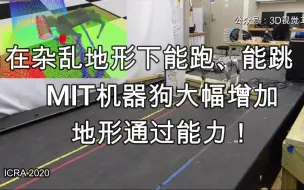
ICRA 2020,MIT机器狗在杂乱地形下能跑、能跳,大幅增强机械狗的地形通过能力!
【惨】2年前笑话我211毕业进厂打螺丝,现在轮到自己了。智能专业,大概也是牛马
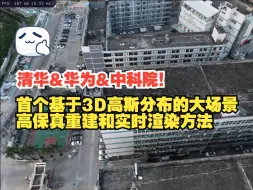
清华&华为&中科院!首个基于3D高斯分布的大场景高保真重建和实时渲染方法
港大火星实验室:在大规模杂乱的3D环境中进行快速无人机探索方案
原来矿道还可以这么漂亮!
NTU开源 | AirSLAM:高效且 光照稳健的点线视觉SLAM系统 嵌入式运行速度可达40HZ
埃隆马斯克(模仿)在推特上分享一段AI视频,表示现在的AI过于强大!
CVPR2023:不使用任何3D数据标签,零样本学习3D场景理解
为什么说 在国内做科研最忌讳踏实?
人工智能新突破!登上Nature神坛!首次被证明具有系统泛化能力,能像人类一样举一反三!
ICRA23开源 !动态环境下高鲁棒的雷达MOT SLAM!
我用 AI 写了一个网站,然后成功把我气死了
Facebook最新研究,针对虚拟现实的实时手部追踪系统,算法已实际部署在Oculus Quest VR头戴式眼镜中
现在的deepfake都已经这么逼真了吗?!
知网,再见!中科院推出8000万免费数据库,可检索1.7亿资源,测试非常流畅好用!刚测试了下,非常流畅好用!强烈建议所有本硕博学生找AI方向的论文用起来!
IJCAI 2024 麻将人工智能比赛 研讨会
ROS2用slam_toolbox建图,树莓派猪脑过载
我的世界登nature子刊!证明神经网络具有空间感知能力!人工智能/深度学习/机器学习
Hovermap,可手持、车载、机载的多平台智能SLAM数据采集系统
CVPR|2024|CorMatch:基于相关性匹配的标签传播,用于半监督语义分割
高通提出无监督和跨单元部署的实时、准确、一致的视频语义分割
南洋理工大学开源F-LOAM:最为精确和快速的开源激光SLAM方案之一
港科大&南科大 跨平台和环境的统一多传感器SLAM数据集
YOLOv8遥遥领先改进:手把手带你改进YOLOv8,增加小目标检测层!傻瓜式操作、保姆级教程!!!
香港大学工作,FAST-LIO:基于紧密耦合迭代卡尔曼滤波的快速、鲁棒的激光雷达里程计包,代码开源
最新ICRA2020论文:视觉里程计回顾:什么特征应该被学习?
作为小米Su7的尊贵车主,被蔚来汽车拉去做了一次宣传!
CVPR'24开源 | 吊打一切VINS!又快又好的视觉惯性导航系统
学生的paper导师挂一作兼通讯是什么心态?
谁能想到,中国人模仿AI的视频竟然在外网火了…
如何提高自己的代码能力以达到熟练使用pytorch?
[RA-L2021] ,使用紧凑场景表示稀疏SLAM实时稠密建图!
ICRA2021,时间异步的多相机视觉SLAM系统,效果大幅提升,更符合实际情况(代码即将开源)
20+FPS!最新开源!加上回环检测的NeRF SLAM竟是如此精确!