V
主页
ICRA23开源 !动态环境下高鲁棒的雷达MOT SLAM!
发布人
在微信公众号「3D视觉工坊」回复:「原论文」,获取论文代码和链接,赶快学起来! MOT SLAM,也就是多目标跟踪SLAM,侧重在动态场景中同时估计机器人本体位姿和动态目标位姿,在动态目标占据当前帧很大比例时可以提高SLAM鲁棒性。其实现有的MOT SLAM主要以视觉方案为主,典型方案包括VDO-SLAM、AirDOS、DynaSLAM II。雷达MOT SLAM相对研究较少,而且开源方案就更少,对于想入门的小伙伴实在是很大的阻力。今天笔者将为大家分享ICRA 2023的开源雷达MOT SLAM方案LIO-SegMOT,基于LIO-SAM二次开发,并且提出了一种异步状态估计因子图,在动态环境中的鲁棒性很高,值得一读。 想看更多关于3D视觉、SLAM,自动驾驶等科技前沿,请立即关注@3D视觉工坊
打开封面
下载高清视频
观看高清视频
视频下载器
太稳啦!Gaussian Splatting杀入6D物体位姿估计!
最新!无人机动态环境感知&规划新思路!
20+FPS!最新开源!加上回环检测的NeRF SLAM竟是如此精确!
IEEE IROS 2019,最新无人机飞控算法,在未知环境下的无人机快速安全航迹规划(代码开源)
3DGS进化,高效高质量的GaussianPro来袭!
极快跟踪一切!DOT:无惧遮挡!
CVPR'24开源 | 吊打一切VINS!又快又好的视觉惯性导航系统!
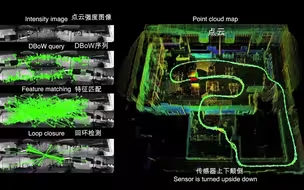
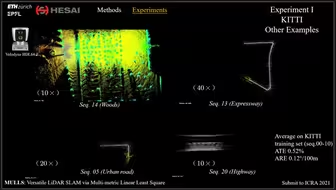
最新ICRA2021论文,基于成像激光雷达的稳健位置识别,代码开源!
港科大&南科大 跨平台和环境的统一多传感器SLAM数据集
三维重建大一统!LSM:无需先验位姿,首次实现实时语义3D重建!
港大火星实验室:在大规模杂乱的3D环境中进行快速无人机探索方案
22年十佳开源SLAM算法
别再用SuGaR了!重磅开源SA-GS:重新定位最新大场景3D重建SOTA(上篇)
香港大学工作,FAST-LIO:基于紧密耦合迭代卡尔曼滤波的快速、鲁棒的激光雷达里程计包,代码开源
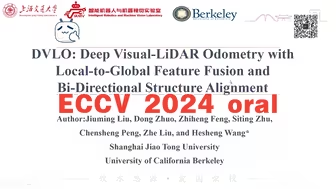
ECCV 2024 oral | 首次基于深度聚类的多模态融合里程计网络
无所不能!OASim基于3D GS的自动驾驶开源和自适应模拟器!
无需 GPS:语义地图引领多机器人室内外探索
BMVC'24开源 | BaseBoostDepth:更强大的自监督单目深度估计
ECCV'24开源 完虐COLMAP!百倍加速!ACEZero:全新SfM革新三维重建!
HeadCraft-超逼真头部细微特征生成!3DMM的革命!
当3DGS遇上可泛化物体位姿估计
具身智能势不可挡GRUtopia首个城市级具身智能仿真平台“浦源·桃源”
来自牛津大学最新论文,统一的多模态地标跟踪,用于紧密耦合激光雷达-视觉-惯性里程计
CVPR'24商汤开源!3DGS再进化,可控的3D编辑!
MIT工作:Kimera,新的实时度量语义的开源SLAM系统(ICRA2020)
透彻剖析室内外激光SLAM算法与实战系列课程-激光SLAM精讲(下)
SCIROBOT2023 港大开源一种用于自主导航的具有扩展传感器视场的自旋转单驱动无人机!
牛津VGG团队最新开源!Flash3D:一张图像重建整个3D场景!通用性超强!
爱丁堡大学!雨雪无阻|毫米波成像雷达赋予具身智能鲁棒的空间感知(上篇)
Mobile-Seed:联合语义分割和边缘检测!
自动驾驶中多个小视场固态激光雷达不依赖参照物的外参标定(代码即将开源)
RAL 2023开源 第一个基于NeRF的实时LiDAR SLAM!
卡内基梅隆大学 | DarkGS移动光源3DGS!从泰坦尼克号这一幕说起
浙大章国锋团队最新NIS-SLAM:突破神经隐式语义RGB-D SLAM的极限(上篇)
要啥激光雷达,2D、2.5D、3D地图我全都有,Factor Perception SDK纯视觉SLAM地图数据展示
炸裂!超快超高精度!普通手机也能运行的实时NeRF!
3DGS SLAM最新SOTA | 使用视觉、深度和惯性测量进行SLAM的多模态3DGS
SIGGRAPH'2024|RTG-SLAM:基于3DGS的大尺度场景实时三维重建-上篇
NeurlPS'24开源 | 迈向SLAM/SfM回环新纪元!MSG:关联场景中共视的地点和目标!
华为最新工作:RoadMap:用于自动驾驶视觉定位的轻量化语义地图