V
主页
京东 11.11 红包
最新ICRA2020论文:视觉里程计回顾:什么特征应该被学习?
发布人
https://www.youtube.com/watch?v=Nl8mFU4SJKY 现有大多数具有优异性能的VO/SLAM系统都基于几何学,必须针对不同的应用场景进行精心设计,并且单目系统都存在尺度漂移问题。本文训练了两个卷积神经网络(CNNs)来估计单视角深度和作为中间输出的双视角光流。在深度预测的基础上,设计了一种简单而稳健的帧到帧VO算法(DF-VO),解决了单视角深度CNN系统尺度漂移问题影响。在KITTI数据集上实验表明了系统鲁棒性,性能上也优于其它纯深度学习或基于几何的方法。
打开封面
下载高清视频
观看高清视频
视频下载器
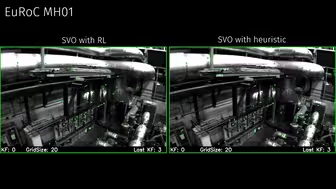
强化学习给视觉里程计自适应调参
轮式里程计激光里程计视觉里程计区别是什么
最新深度学习视觉领域进展应用:NVIDIA MAXING AI云视频处理平台
基于单张图片的3D人脸重建概述
四旋翼无人机-PX4控制算法原理
PID控制器原理讲解
来自牛津大学最新论文,统一的多模态地标跟踪,用于紧密耦合激光雷达-视觉-惯性里程计
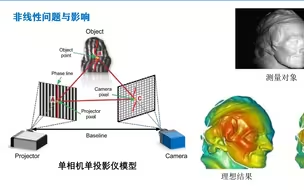
结构光的非线性问题与校正
四旋翼无人机-PX4控制算法代码
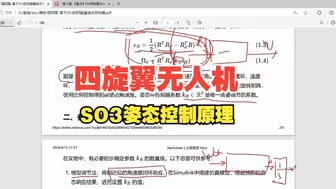
四旋翼无人机-SO3姿态控制原理
CVPR2023|基于深度学习MVS的最新进展 GeoMVSNet
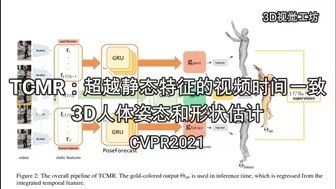
[CVPR2021] TCMR:超越静态特征的视频时间一致3D人体姿态估计
基于大规模公路环境的鲁棒激光惯性里程计与建图方法
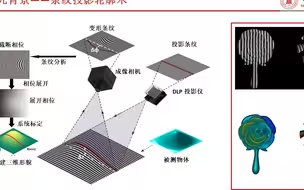
光学3D测量技术原理及应用
视觉快速定位与实时稠密简图简介
当MVS遇上Gaussian MVSGaussian 快速、可泛化的高斯重建框架!-上篇
听劝!【张雪峰】人工智能AI学习压力非常大!你能承受的了吗?!骂醒一个是一个!!!零基础入门人工智能/机器学习入门
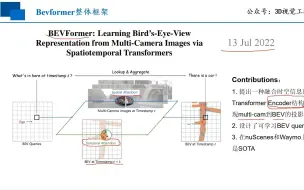
BEVFormer:时空transformer架构
无人机-PID算法详解与实战
【比看狂飙还爽!】2024年最全人工智能入门的天花板教程!不接受任何反驳,草履虫都能学会!人工智能|AI|机器学习|深度学习|)
【强化学习实战】计算机博士花半天带你学会强化学习PPO算法/DQN算法/A3C算法原理及实战!_AI/人工智能/深度学习/强化学习
经典3d视觉论文回顾,Facebook用『SLAM+实时光流』实现AR真实遮挡效果,发表在顶刊 ACM Transactions on Graphic 2018
【3D视觉工坊】第十三公开课:基于格雷码结合相移技术的高鲁棒性高效率动态三维面形测量
比刷剧还爽!2024最新人工智能全套课程!从入门到进阶,全程干货讲解,就怕你不学!(AI丨机器学习丨深度学习丨神经网络))
[ICRA2022]谷歌机器人子公司Intrinsic最新开源机器人抓取论文
采用渐进式传播的3D 高斯抛雪球算法
看了吴恩达的深度学习,看了小土堆的pytorch、李沐的动手学深度学深度学习也看完了!可是啥都看不懂
史上最强换脸软件FaceFusion3.0来了(附整合包)!从安装到使用一个视频讲明白!增加最新换脸模型+人脸解析模型、支持LivePortrait表情控制
最新CVPR2020论文:SuperGlue(超级胶水):用图神经网络来做图像匹配,超越现有所有匹配算法
一个神级代码复现网站,里面99%的论文都能找到!
Open3D-三维数据结构
四旋翼无人机-TD跟踪微分器原理与仿真
自动驾驶中的深度学习模型部署实战-数据预处理NPP库介绍及CUDA编程模型之线程操作
【3D视觉工坊】第七期公开课:图像对齐算法
ICRA2020论文,基于CNN和点云分割的LiDAR-SLAM点云回环检测方法
大作业|激光-视觉-IMU-GPS融合SLAM算法
DoGaussian:分布式训练3DGS,速度提升6倍以上,高质量渲染-上篇
3D视觉应用-现代智慧农业
自动驾驶实战课之多相机间的同步实战
【新书带读1.1】深度神经网络再认识,在非线性空间时空穿梭