V
主页
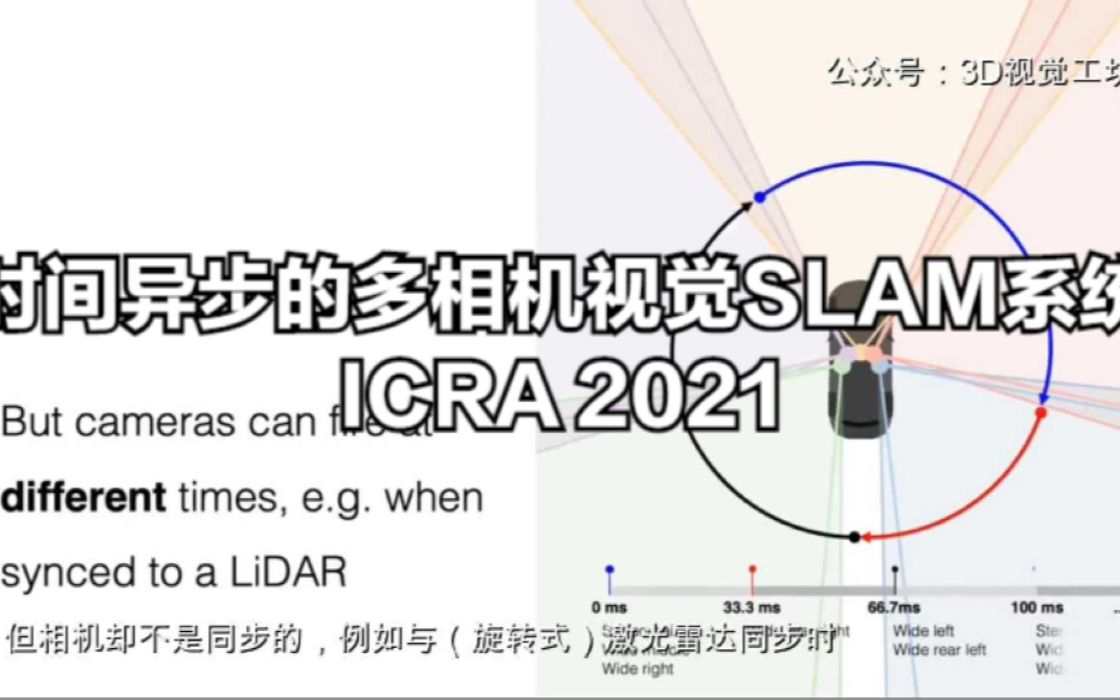
ICRA2021,时间异步的多相机视觉SLAM系统,效果大幅提升,更符合实际情况(代码即将开源)
发布人
https://www.youtube.com/watch?v=EV1vhUkHIy8 目前一台自动驾驶的车上通常都配置有6、7个摄像头。现有的多目SLAM系统大多假设所有相机都采用同步快门假设,然而在实际中相机的同步方式却并大多是异步的(由于目前大多采用旋转式激光雷达,做图像与雷达融合的时候,我们只需要和激光雷达视场重合的相机图像)。在这项工作中,我们提出了一个广义的多相机 SLAM 系统,它考虑了异步传感器观测,集成了一个连续时间运动模型,以便在跟踪、局部映射和循环闭合期间跨异步多帧关联信息。
打开封面
下载高清视频
观看高清视频
视频下载器
ECCV'24开源 | 又快又好!6DGS重新定义6D物体位姿估计!
如何学习NeRF/3DGS-SLAM?(公开课直播回放)
如何轻松拿捏LIO-SAM-数学基础篇
ORB-SLAM3基本原理与系统架构
牛津VGG团队最新开源!Flash3D:一张图像重建整个3D场景!通用性超强!
光学3D测量技术原理及应用
无需额外训练!SAMPro3D:零样本3D分割一切!
传感器与遥控器校准原理
LVI-SAM|视觉-惯性子系统(VIS)代码精读
BMVC'24开源 | BaseBoostDepth:更强大的自监督单目深度估计
无相机姿态40秒重建3DGS方法
Open3D与点云处理简介(公开课)
LVI-SAM代码实战与评估
大作业|激光-视觉-IMU-GPS融合SLAM算法
Mobile-Seed:联合语义分割和边缘检测!
四旋翼无人机-PX4控制算法代码
深度相机概述
绪论(LOAM系列与LIO-SAM简介)
ICRA23开源 动态环境下高鲁棒的雷达MOT SLAM!
小白如何手写g2o优化? 残差构建、雅克比推导、优化函数
单目深度估计|连续帧方法实战课
四元数基础
终于有人教我写论文了!中山大学最新论文写作教程,只需20分钟教你写出一篇研究性论文&综述!
高速结构光三维面形测量方法
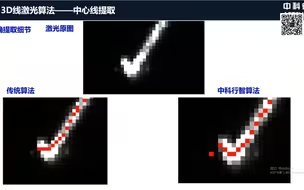
3D线激光相机检测技术解析与应用分享
双目相机标定基础及标定实战
Linux驱动基础知识与SLAM关系
如何进行三维重建?从单帧深度估计到完整模型重建
ECCV'24 | 更快更准!Meta最新FPV-NeRF:将NeRF完美应用FPV!
3DGS进化,高效高质量的GaussianPro来袭!
中国科学技术大学-MM-Gaussian:多模态室外3DGS SLAM
单目无监督深度估计综述
点云3D深度学习模型与实践
MA-LIO:使用逐点 LiDAR 间不确定性传播的异步多LiDAR 惯性里程计
3DGS SLAM最新SOTA | 使用视觉、深度和惯性测量进行SLAM的多模态3DGS
零基础入门四旋翼建模与控制无人机 | 数学模型
清华最新开源万能3D分割一切!
【3D视觉工坊】第十四期直播 慕尼黑工业大学博士详解室内SLAM中的几何约束
2.4倍加速!PRAM最新开源的视觉定位模型!解锁以地图为中心的学习!
透彻剖析室内外激光SLAM算法与实战系列课程-室内激光SLAM建图定位实战