V
主页
代码开源!伦敦大学学院:DSP-SLAM:物体特征级SLAM
发布人
https://www.youtube.com/watch?v=of4ANH24LP4 DSP-SLAM将基于特征的SLAM系统重建的三维点云作为输入,并使其具备通过稠密重建检测对象来增强其稀疏地图的能力。通过语义实例分割检测目标,并通过一种新的二阶优化算法,以特定类别的深度形状嵌入作为先验估计目标的形状和姿态,通过集束调整构建姿势图,以联合优化相机姿势、对象位置和特征点。DSP-SLAM可以在3种不同的输入模式下以每秒10帧的速度工作:单目、立双目或双目+激光雷达。具体效果请看视频!
打开封面
下载高清视频
观看高清视频
视频下载器
Kivicube AR平台:低代码可视化编辑即可完成SLAM场景制作
大作业|激光-视觉-IMU-GPS融合SLAM算法
CVPR'24开源 通过3D GS进行整体城市3D场景理解!
这绝对是质量最高的单目深度估计开源方案!
2.4倍加速!PRAM最新开源的视觉定位模型!解锁以地图为中心的学习!
CVPR23开源 超越LoFTR!大尺度变化下的特征匹配!
Mobile-Seed:联合语义分割和边缘检测!
神经辐射场照亮动态SLAM:构建精细场景地图
上海 AI Lab&同济大学!基于八叉树结构的3D高斯体渲染方法,实现一致的实时渲染性能
相机标定的基本原理与经验分享
Nature子刊!MARS实验室最新开源:基于LiDAR点流的运动事件检测!
ICRA2024 牛津提出NeRF融合激光雷达SLAM的大场景重建
卡内基梅隆大学 | DarkGS移动光源3DGS!从泰坦尼克号这一幕说起
ICML'24开源 迈向真实世界!LEO:3D世界中的具身通才Agent
如何轻松拿捏LIO-SAM-数学基础篇
上交最新开源!仅需4张图像实现高质量3D重建!
ICRA23开源 动态环境下高鲁棒的雷达MOT SLAM!
港科大&南科大 跨平台和环境的统一多传感器SLAM数据集
CVPR'24 奔驰DualAD解耦动态和静态世界实现端到端驾驶!
WACV2023:基于结构光的RGB事件相机(代码开源)
107 FPS!开源!结合ICP和3D GS构建最快的稠密SLAM!
中科院最新CityGaussian:VRAR时代的城市重建新标杆
速度提升10倍以上!Depth Anything V2更稳健、精细的单目深度估计
3DGS进化?2DGS颠覆3D场景重建!
Nature正刊开源!突破低延迟自动驾驶视觉感知!
香港大学&南科大!基于强化学习和速度障碍法的多机器人导航
中科院新作!即插即用的meshing模块!精确构建无动态mesh地图,还能纠正里程计!
极快跟踪一切!DOT:无惧遮挡!
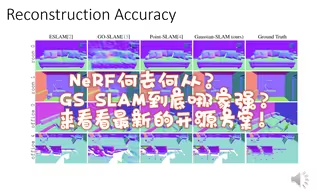
NeRF何去何从?GS SLAM到底哪家强?来看看最新的开源方案!
神奇!树脂+玻璃+手机就能制作3D全息投影?
无需标定板,高分辨率LiDAR和相机的像素级外部自标定,代码开源
CoherentGS:从稀疏的输入图像中重建高质量的3D场景
MIT最新突破!SplaTAM:实现高速SLAM与实时3D渲染的全新方法!
首发!首个集成内容投影的实时结构光系统!
[RA-L2021] ,使用紧凑场景表示稀疏SLAM实时稠密建图!
给任何模型上色!腾讯打通三维重建最后一关:高质量纹理生成!
绪论(LOAM系列与LIO-SAM简介)
ECCV'24 | 更快更准!Meta最新FPV-NeRF:将NeRF完美应用FPV!
3D视觉应用-现代智慧农业
(公开课)视觉SLAM原理与ORB-SLAM3系列算法