V
主页
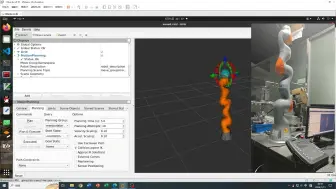
北京工业大学《机器人操作系统基础》作业——小乌龟例程测试ROS安装与ROS1通信机制初探
发布人
课程作业,没啥好说的
打开封面
下载高清视频
观看高清视频
视频下载器
强化学习导航:仿真环境训练及ROS实车部署
《基于ROS2的决策规划算法工程》动态避障演示 无人小车的松弛感
《ROS 2机器人开发从入门到实践》1.3 运行你的第一个机器人
机器人公司终于来了位00后运营,领导非常放心,大家觉得怎么样?
《基于ROS2的决策规划算法工程开发》实机演示
Unitree 2024 ROS暑期学校课程视频03-人形机器人运动控制分享
Unitree 2024 ROS暑期学校课程视频01-四足机器人Go2开发分享
浙江大学四发飞镖全部命中敌方基地,直接结束比赛!!!!!【2024年第二十三届全国大学生机器人大赛RoboMaster机甲大师超级对抗赛•国赛】
《松灵ROS 2开讲啦》第三期 ROS 2的URDF编写和Gazebo仿真控制
开箱7自由度协作机械臂,AI视觉识别交互,玩转各种AI创意!
医学生实训作业——身体评估『69』
移动机械臂抓取
在flatland中使用双阿克曼模型进行路径规划与跟踪
最后还是用amcl定位才连续成功导航了三次
QT制作的iiwa机械臂控制ui演示
大家对这个mid360雷达呼声很高嘛|做出来演示一下
连续工作21天,国产机器人 " 牛马 " 上线
【告别模糊】机器人专用摄像头,为您的视觉算法保驾护航
FR3仿真机+真机MoveIt路径规划 阿凯法奥ROS包(akai-fr-ros)
机械臂协调控制复现
ROS 颜色目标跟随的 C++ 实现
手眼臂合一!亚博智能&大象机器人联手打造,7自由度AI视觉协作机械臂!
路径跟踪 | 最优控制LQR算法实现(ROS C++/Python/Matlab)
《PIP战队电控组入门教程》第一章-开发环境配置——安装CUBE MX
[开源了]全球最小的桌面级双轮足机器人(开源地址在视频简介)
练习运球
作业帮vip问答老师是被难死了吗?
孩子考试成绩不理想(bushi
告别农药!哈工大打造中国首台激光除草机器人,无需人力,一小时智能除草十万棵!
Unitree 2024 ROS暑期学校课程视频02-人形机器人H1开发分享
无人机自主穿环实验(3.5寸飞机首飞成功)
《PIP战队电控组入门教程》第一章-开发环境配置——安装MDK-ARM
给PIPer们做一个小直角灯条
【2025工创赛】垃圾分拣赛项单个垃圾测试
北京工业大学自动驾驶仿真实训平台,丰富多车及车路协同实训教学
人形机器人发展迅猛,未来可做家务、陪伴老人小孩等 你希望未来拥有一台吗?
手眼臂合一!亚博智能&大象机器人联手打造,7自由度AI视觉协作机械臂!
未来已来 机器人触觉新突破