V
主页
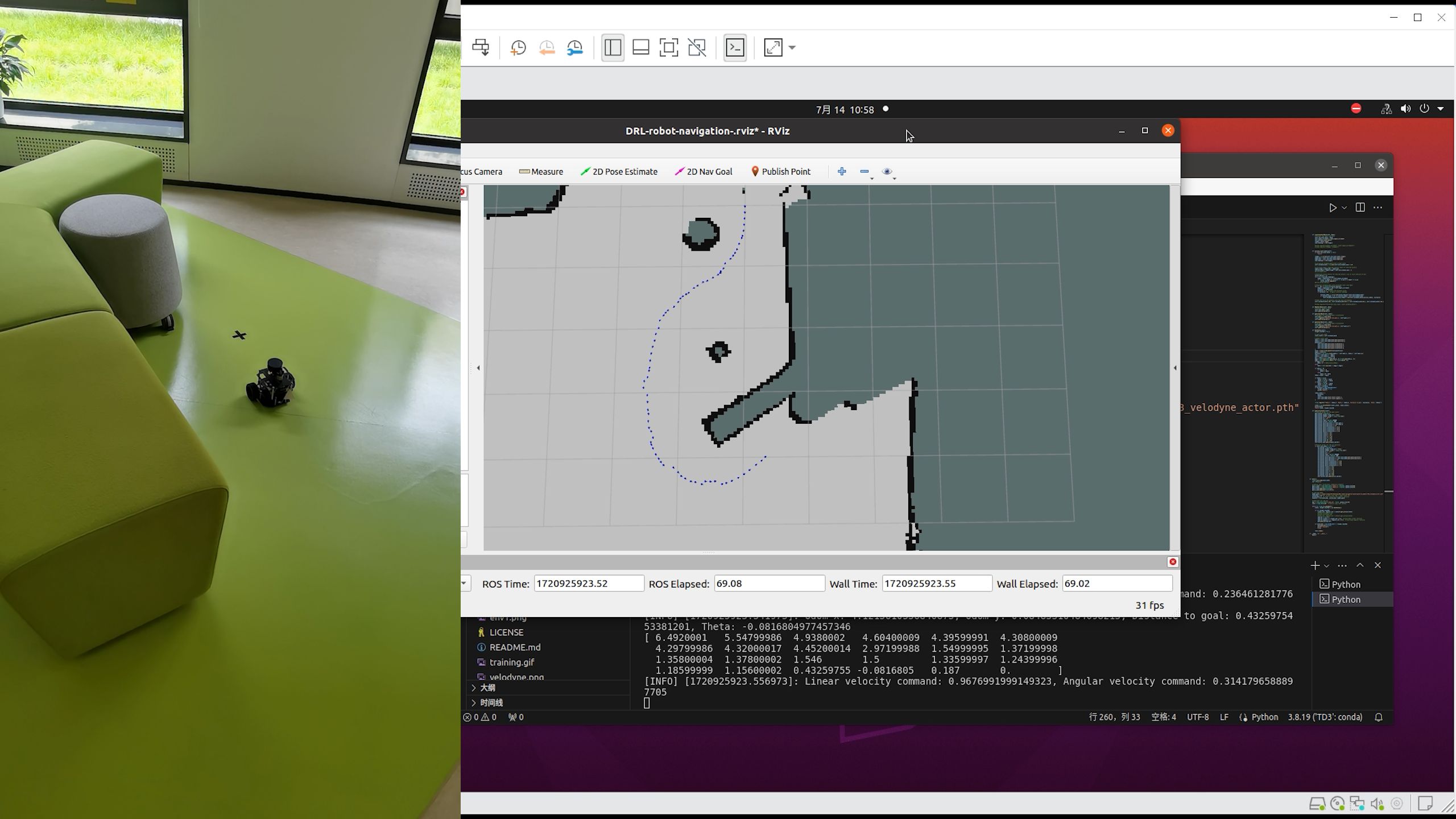
强化学习导航:仿真环境训练及ROS实车部署
发布人
基于开源项目:https://github.com/reiniscimurs/DRL-robot-navigation 以及论文:https://ieeexplore.ieee.org/document/9645287?source=authoralert 算法是TD3,原项目仅有仿真训练的部分,于是简单地训练了一下并且部署到实车上测试了效果。本来想以仿真训练得到的模型为基础进行实车训练的,不过太耗时间所以就没搞( 不依赖地图,实际在原论文中只作为局部路径规划,但训练好后可直接应用于陌生环境 完全是外行,研究方向和ROS、强化学习其实并不沾边,不过还是写了一份说明文档:https://zhuanlan.zhihu.com/p/709427766。如有问题敬请指正
打开封面
下载高清视频
观看高清视频
视频下载器
在isaaclab中开发viplanner端到端导航
《ROS 2机器人开发从入门到实践》7.3.5导航过程中进行动态避障
强化学习魅力时刻
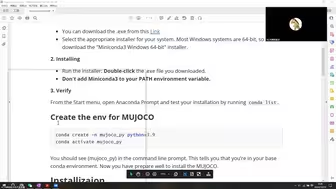
Mujoco安装指南
dreamWaq复现尝试
Diffusion Policy 结合 PPO 模仿+强化 (下)
《ROS 2机器人开发从入门到实践》7.5.2编写巡检控制节点
CV强化论文分享-20241025-02
《ROS 2机器人开发从入门到实践》7.3.7 优化机器人到点精度
太完整了!我居然3天时间就掌握了【机器学习+深度学习+强化学习+PyTorch】理论到实战,多亏了这个课程,绝对通俗易懂纯干货分享!
有电脑就行!三分钟安装 openEuler 操作系统并搭建ROS环境
工训赛超强防干扰定位算法展示
利用大语言模型增强机器人导航(ReMEmbR)
强推!2024年最适合初学者入门学习的《机器学习+深度学习+强化学习》上海交大和腾讯强强联合打造!太全面了!
动画讲解深度强化学习(RL、Q-网络、策略优化、大模型算法入门教程)
右边两足走路也是双足行走
奔跑有点难度,步态很抽象,大佬们有没有什么好建议
TITA强化学习迁移
第14届智能交通工具的规划、感知和导航主题workshop回顾@IROS
Isaac Sim和ROS2自主移动机器人(bcr_bot)
使用Isaac对Orin NX进行硬件在环测试(视觉SLAM)
使用 Isaac Sim 和 Isaac ROS 实现 AMR 视觉导航
不愧是李宏毅老师讲的【强化学习】简直太详细了!全程干货,通俗易懂,看完就跑通!(人工智能|机器学习|深度学习|强化学习)
闲置一年的自制ros小车,终于第一次成功利用开源gmapping建图
基于Gazebo的无人车激光SLAM建图与导航仿真
智在臂得,3D深度视觉机械臂轻松搞定三维空间环境感知,体积测算、空间抓取,简直超酷!
如何用rl_sar采集训练执行器网络的数据
【西湖公开课】西湖博导赵世钰的强化学习免费课程来了
不愧是顶会收割机!迪哥精讲强化学习4大主流算法:PPO、Q-learning、DQN、A3C 50集入门到精通!
具身智能机械臂实操入门课程-03:机械臂的数据集录制与模型训练
使用Isaac Sim和ROS2实现大田农业机器人
【开源无人车】从零组装一辆开源PIX无人车
端到端机械臂视觉抓取无人配送的场景演示
STM32 自主导航小车 S弯 航线跟踪 路径规划 MATLAB仿真
ChatGPT驱动清洁机器人背后依靠强化学习开源项目
Stanford CS234 2024 Spring | 强化学习 | Reinforcement Learning
这应该是你能找到的讲解最系统全面的【强化学习】教程!北大出身王树森教授从零到一保姆式教学,小白也能很好懂!
【2024汽车年会】大数据和人工智能:从系统辨识到AI建模 从最优控制到强化学习
210:cyber 无人船优化反步控制 轨迹跟踪 强化学习Actor-critic架构,李雅普诺夫稳定性,优化反布控制,强化学习(RL),水面舰艇
《ROS 2机器人开发从入门到实践》7.3.6优化导航速度和膨胀半径