V
主页
MPC and RL【模型预测控制与强化学习】- 4-Dynamic Programming and LQR
发布人
https://www.syscop.de/teaching/ss2021/model-predictive-control-and-reinforcement-learning 该系列视频是Freiburg大学2021年面向工程、计算机科学、数学、物理和其他数学科学的硕士和博士生开设的模块课程。目的是让参与者了解模型预测控制(MPC)和强化学习(RL)的主要概念,以及这两种方法之间的异同。在实践练习和项目工作中,他们学习将这些方法应用于科学和工程中的实际最优控制问题。 该课程包括讲座、练习和项目工作。第一周的讲座将由弗赖堡大学的Joschka Boedecker教授和Moritz Diehl教授博士主讲。第二周的课程将由挪威NTNU Trondheim的Sebastien Gros教授和美国加州大学伯克利分校的Sergey Levine教授博士主讲邀请嘉宾。
打开封面
下载高清视频
观看高清视频
视频下载器
MPC and RL【模型预测控制与强化学习】- 2-Dynamic Systems and Simulation
MPC and RL【模型预测控制与强化学习】-1-Introduction
MPC and RL【模型预测控制与强化学习】7-2-Numerical Optimal Control
【模型预测控制与强化学习】Sebastien Gros- Adaptation of MPC via RL: fundamental principle
Sebastien Gros- RL and MPC: safety, stability, and some more recent results
MPC and RL【模型预测控制与强化学习】10.11- On/offpolicy RL with Function Approximation
MPC and RL【模型预测控制与强化学习】15 - Planning and Learning
斯坦福大学《在不确定性下的决策Stanford AA228/CS238 Decision Making Under Uncertainty》deepseek
Learning-based Model Predictive Control - Towards Safe Learning in Control
Data-driven MPC_ From linear to nonlinear systems with guarantees
MPC and RL【模型预测控制与强化学习】13-Advanced Value-based Methods
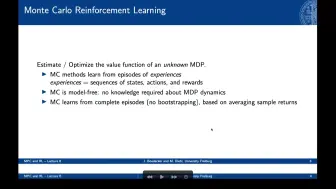
MPC and RL【模型预测控制与强化学习】6 Monte Carlo RL, Temporal Difference and Q-Learning
强化学习魅力时刻
MPC and RL【模型预测控制与强化学习】- 3-Numerical Optimization
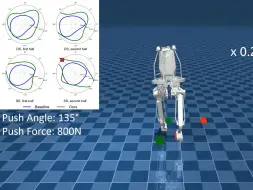
[搬] 稳健的类人机器人行走-通过强化学习增强基于模型的控制
Nonlinear Control_ Hamilton Jacobi Bellman (HJB) and Dynamic Programming
Stanford CS234 2024 Spring | 强化学习 | Reinforcement Learning
[搬] 在线 DNN 驱动的非线性 MPC,用于步幅调节的仿人机器人步行
MPC and RL【模型预测控制与强化学习】- 5-MDPs, PI and VI
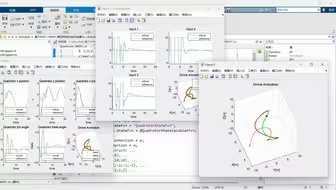
基于MPC+NMPC模型预测控制四旋翼无人机轨迹跟踪仿真【附说明文档】
Lec10-1: 强化学习Overview (现代控制、MPC、强化学习的概览)
[复现]基于MPC模型预测控制的AUV水下机器人轨迹跟踪控制编队(分布式Lyapunov)
MPC模型预测控制仿真实现(双积分、倒立摆、车辆运动学跟踪控制)
强化学习及其在无人系统中的应用
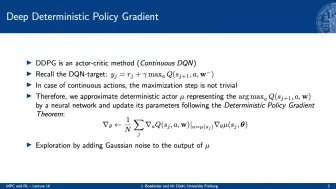
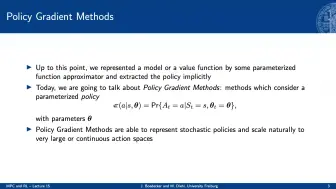
MPC and RL【模型预测控制与强化学习】12 - Policy Gradient Methods
通俗理解大模型从预训练到微调实战!P-Tuning微调、Lora-QLora、RLHF基于人类反馈的强化学习
最优控制
Lec9: 强化学习的概率论基础Review(世界是确定的,条件概率,条件期望,towering property)
使用ROS2-Control + RL来控制四足机器人
【超多模型MPC算法】开源Mujoco-MPC演示
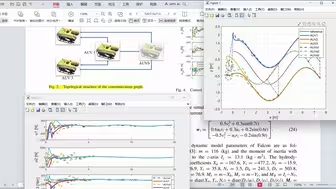
210:cyber 无人船优化反步控制 轨迹跟踪 强化学习Actor-critic架构,李雅普诺夫稳定性,优化反布控制,强化学习(RL),水面舰艇
强化小伙终于起立了
基于NMPC模型预测控制的平行泊车轨迹规划+MPC控制车辆运动学模型轨迹跟踪Matlab仿真【附说明文档】
斯坦福大学《强化学习|Stanford CS234 Reinforcement Learning 2024》deepseek翻译
RLChina 2024 | 3小时强化学习入门课程-下
恶魔田文华,利益熏心赚黑心钱,导致无数儿童变成了大头娃娃
[复现]基于李雅普诺夫的模型预测控制MPC水下机器人AUV方法路径跟踪
强化学习,启动!
如何用rl_sar采集训练执行器网络的数据
HJB方程, 动态规划和随机最优控制—1