V
主页
210:cyber 无人船优化反步控制 轨迹跟踪 强化学习Actor-critic架构,李雅普诺夫稳定性,优化反布控制,强化学习(RL),水面舰艇
发布人
摘要:本文提出了一种基于优化反步控制的水面舰船跟踪控制方法,该方法将优化作为一种反步设计原则。由于水面舰船系统是严格反馈形式的二阶动力学模型,因此反演是完成跟踪任务的理想方法。在水面舰艇反步控制中,将虚拟控制和实际控制设计为相应子系统的优化解,从而实现整体控制的优化。通常,优化控制是基于Hamilton-Jacobi-Bellman方程的解来设计的。然而,由于其固有的非线性和复杂性,求解该方程非常困难,甚至是不可能的。为了克服这一困难,通常考虑Actor-critic架构的强化学习(RL)策略,其中利用critic和Actor分别评估控制性能和执行控制行为。通过将actor-critic RL算法应用于船舶的虚拟和实际控制,证明可以达到理想的优化和跟踪性能。
打开封面
下载高清视频
观看高清视频
视频下载器
顶刊:无人船轨迹跟踪 优化反步控制 强化学习 Actor-critic算法
顶刊 TNNLS 复现:基于强化学习的机械臂固定时间轨迹跟踪控制
2022 OE-基于Q学习和数据驱动的无人船舶航向控制和轨迹跟踪 文献+ PYTHON 复现
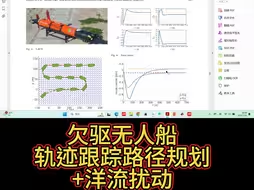
trans:欠驱无人船轨迹跟踪 路径规划 处理洋流扰动
【自制】欠驱无人船 自适应神经网络 固定时间 轨迹跟踪控制 直线+圆形轨迹跟踪simulink
自适应神经网络+滑模控制_水面舰船轨迹跟踪程序(IEEE文献)
强化学习 栅格地图 路径规划算法 DQN 算法 matlab
基于高阶全驱系统理论的高速飞行器自适应容错跟踪控制
珠海航展无人船集群作战演示
213 四旋翼无人机轨迹跟踪 预设时间预设性能约束 反步法 自适应动态面 障碍李亚普诺夫函数完成了上述所有算法,有公式推导和 simulink 仿真
【自制】水下无人艇三维动态路径规划 避障 模型预测控制
【国防科大学报】基于迭代学习的卫星姿态滑模容错控制 simulink
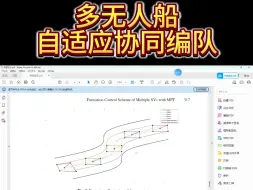
多无人船编队 模型预测控制 自适应强化学习#无人船编队 #MPC #自适应强化学习#论文复现
强化学习魅力时刻
146 水下无人艇三维路径跟踪+事件触发+模型预测控制包含参考文献和MATLAB 代码
水下地形测量好帮手,无人船来啦
g1套humanoid_gym
四旋翼无人机轨迹跟踪预定义时间事件触发滑模控制(文献+simulink仿真)
TAC: 多目标跟踪 时变编队 多目标围捕
多智能体系统安全自适应强化学习
【自制】欠驱无人船 自适应神经网络 固定时间 轨迹跟踪控制 直线+圆形轨迹跟踪
[搬] 稳健的类人机器人行走-通过强化学习增强基于模型的控制
无人驾驶汽车轨迹跟踪算法
自动驾驶冲锋舟
探访珠海航展无人机展区 近看虎鲸无人作战艇
四旋翼轨迹跟踪PID控制及位置环 PID 控制 姿态环滑模控制8 字 三维8 字 螺旋上升三种轨迹包含公式说明文档
【开源无人船】H12pro使用海康威视摄像头
Cyber:动态事件触发 多智能体 分布式一致性控制 文献+matlab 代码
【顶刊复现】欠驱无人船轨迹跟踪+洋流扰动
如何用rl_sar采集训练执行器网络的数据
TITA强化学习迁移
Stanford CS234 2024 Spring | 强化学习 | Reinforcement Learning
208 cyber 非线性时延多智能体系统固定时间一致性控制
TAC:事件触发 自适应 状态跟踪控制线性部分时变连续时间(CT)系统,模型参考自适应控制(MRAC),非线性状态相关匹配参数不确定性
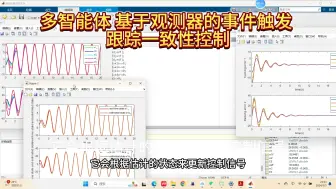
多智能体基于观测器的事件触发跟踪一致性控制
CV强化论文分享-20241025-02
基于状态空间模型预测控制的四旋翼路径跟踪实现 (文档+仿真 NMPC )
无人车 自动驾驶 自动避障
【Python】人形机器人——强化学习
太完整了!我居然3天时间就掌握了【机器学习+深度学习+强化学习+PyTorch】理论到实战,多亏了这个课程,绝对通俗易懂纯干货分享!