V
主页
为什么使用 C++ 编写机器人程序?
发布人
Let's observe c++ and python in robotics . From below perspectives - Jobs priority - Code Execution - Memory management 00:00 Introduction 00:17 C++ Dominates Robotics: Why & When 01:57 Harmonic Sum Example 04:06 Memory Management: Python's Pitfalls, C++'s Power 06:17 Python to C++: A Robotics Programmer's Journey 🖐My Social Profiles : - Linkedin: https://www.linkedin.com/in/muhammad-... - Twitter: https://twitter.com/noshluk2 - Facebook Group : https://m.facebook.com/roboticsWithLu... #ROS2 #Robotics #robotisim
打开封面
下载高清视频
观看高清视频
视频下载器
斯坦福大学开源 - 机器人技能学习 通用操作接口 UMI (Universal Manipulation Interface) Demo
通过轮式仿人机器人的全身遥操作实现动态移动操纵
第十九期:示教点偏移
ROS2 Actions [1H Crash Course]
RI Seminar —— 教机器人做手术
ROS 颜色目标识别与定位的 Python 实现
斯坦福大学研究 - 用于机械手设计的动力学扩散模型
多伦多大学 —— 四旋翼动力学与控制
教程:使用 CVXPY 进行凸优化 - SciPy 2022
调车总不能炸机了吧(●'◡'●)
斯坦福大学 Khatib 讲座 —— 深海机器人探索
CoRL 讲座 Scott Kuindersma - 基于模型的控制有助于学习
CppCon 2023 讲座 —— 利用 C++ 和 ROS 实现仿真器、传感器数据和算法
CoRL 讲座 —— 用于机器人的预训练模型
CoRL 讲座 —— 利用 MuJoCo 物理模型进行基于模型的优化
Rust 窃取了 C++ 的最佳功能
MATLAB - Understanding Kalman Filters 官方出品
IROS 2023 基于模型的多接触操作
MATLAB - Understanding Control Systems 官方出品
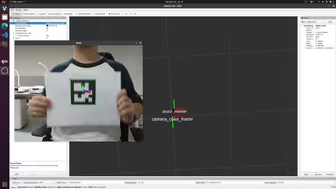
【考核用】调用opencv识别aruco码,在ros中更新tf
鲁文大学研究 —— 影响分析用于规划机器人机械手的目标非滑动影响
足式运动和操作的实时最优控制 - Marco Hutter
套件教程-RTABMap之3D雷达定位与导航
CoRL 讲座 - 从演示到自主操作的机器人操作数据
斯坦福讲座 - 将交互设备与用户身体融合
Python、Go、Rust都已不再OOP。时代早就变了。
慕尼黑工大机器人研究 —— 人工神经假肢控制系统
MATLAB - 传感器融合和跟踪 官方出品
CoRL 讲座 —— 用于模仿学习的人在回路(HITL)任务和运动规划(TAMP)
MATLAB - 使用 RRT 算法路径规划(官方出品)
Isaac ROS Office Hours
MIT 欠驱动机器人学 2024 第 4 讲 动态规划 II
2017年波士顿动力的Atlas牌消防员
波士顿动力 Predictably Spot-On Industrial Inspection Boston Dynamics
【开源无人机】Vins_fusion代码讲解
三大主流编程语言Python、C++ 、Java究竟有什么区别
深度无监督学习 UC 伯克利 第 4 讲 潜变量模型与变分自编码器
利用封闭式平行运动链实现仿人机器人的全身控制
【开源无人机】从零调试一架开源无人机
CoRL 讲座 —— 人工智能机器人在现实世界中的应用