V
主页
CppCon 2023 讲座 —— 利用 C++ 和 ROS 实现仿真器、传感器数据和算法
发布人
https://cppcon.org/ --- 架设桥梁: 利用 C++ 和 ROS 实现模拟器、传感器数据和算法 - Cesar Gerardo Bravo Conejo 和 Divya Aggarwal - CppCon 2023 https://github.com/CppCon/CppCon2023 在机器人领域开发关键任务软件时,当务之急是为验证和确认奠定坚实的基础。从测试运行中收集数据以及建立基础设施和物流需要花费大量的时间和资源。对不同场景进行模拟和测试是一种非常稳健的替代方法,而且易于扩展。出于安全考虑,模拟和测试对于在实际机器上难以复制的场景也非常方便。要为任何生产意图系统开发仿真软件,首选的自然语言是 C++,因为它支持跨平台兼容性和实时性能。 提供模拟器的供应商很多,但每个模拟器都有不同的接口和数据类型。由于应用程序无需修改即可在模拟环境中运行,因此需要一个软件组件来转换模拟器和客户端应用程序之间的通信。该组件被称为通信桥,负责转换模拟器中虚拟传感器的数据,包括来自应用程序的命令和控制信号。通常情况下,不同供应商的模拟器都带有某种类型的通信桥,但它们并不标准化,因此很难切换模拟器或将它们用于协同模拟。如果我们能设计一个可扩展的框架,让不同的模拟器都能轻松集成,就能大大简化这些用例。 为了解决这个问题,我们提出了一种开发通信桥接器的方法,这种桥接器具有定义明确的接口,可以使用 C++ 和 ROS 2(一种在机器人领域应用非常广泛的中间件框架)轻松集成各种机器人模拟器。通过所介绍的设计,我们将能够为一个参考自动驾驶应用程序概括数据交换和命令反馈回路的逻辑,并将面向用户的应用程序接口、支持的传感器和环境等模拟器特定细节留给实现定义抽象的类来处理。我们还将讨论激励模拟场景和测试的一个关键要求,即确定性执行。在确定性环境中,测试是可重现的,而且确定性通过在每个瞬间以已知状态执行软件简化了调试。我们将通过通信桥接器的具体实现和使用我们的 C++ 执行管理框架,详细介绍我们是如何实现这一点的。 --- 迪维亚-阿加瓦尔 Divya Aggarwal 是一名应用工程师,供职于 Apex.AI,负责开发安全关键型实时机器人软件。她是 C++11/14/17 和 ROS 2 等机器人软件框架方面的专家。她在整个自动驾驶软件堆栈方面经验丰富,从建立与相机和激光雷达等车辆传感器的接口,到使用 CARLA/ LGSVL 对车辆场景进行仿真,再到在汽车 ECU 上部署软件。 --- Cesar Gerardo Bravo Conejo Cesar Gerardo Bravo Conejo 热衷于自主和移动机器人应用。 Gerardo 目前在 Apex.AI 公司工作,专门从事使用 ROS 2 优化自动驾驶堆栈性能的工作。 Gerardo 还曾在汽车行业工作,为 ADAS 应用实施计算机视觉算法和数据驱动技术。Gerardo 过去的学术项目包括开发用于竞技目的的自动导航系统。 --- 视频由 Bash Films 拍摄和编辑:http://www.BashFilms.com YouTube 频道由 Digital Medium Ltd 管理:https://events.digital-medium.co.uk --- 注册参加 CppCon:https://cppcon.org/registration/ #cppcon #cppprogramming #cpp #robotics
打开封面
下载高清视频
观看高清视频
视频下载器
CMU 机器人讲座 —— 构建适应性强的通用机器人
教程:使用 CVXPY 进行凸优化 - SciPy 2022
斯坦福开源 - 机器人技能学习 通用接口UMI - 机械夹爪装配教程
MIT 机器人讲座 —— 利用感知与 AI 增强人机交互(人与自然交互)
【中英+笔记】【续集完整版】追寻永生:人形机器人Neo与1X副总裁Eric Jang|2024.09.10
为什么使用 C++ 编写机器人程序?
MATLAB - 使用 RRT 算法路径规划(官方出品)
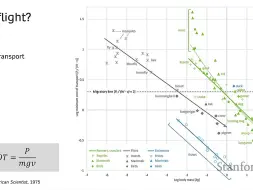
斯坦福机器人讲座 - Flying Robots Exploring Hybrid Locomotion and Physical Interaction
CMU 最优控制 2024 第 17 讲 迭代学习控制(Iterative Learning Control)
CMU 最优控制 2024 第 9 讲 凸 MPC
CMU 最优控制 2024 助教补充 第 7 讲
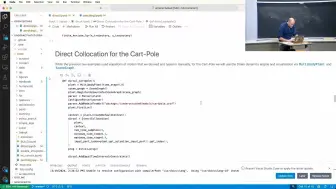
MIT 欠驱动机器人学 2024 第12 讲 轨迹稳定 I
IEEE 机器人讲座 —— MuJoCo MPC (MJPC)介绍
【强化学习玩游戏】强化学习轮足机器人控制器,PPO算法原理+公式推导,月球登陆器训练+超级马里奥简单易懂的项目实战!
CoRL 讲座 —— 用于机器人的预训练模型
MATLAB - Understanding Kalman Filters 官方出品
宾大 GRASP 讲座 —— 磁性手术机器人: 深入人体的 "奇幻之旅
CMU 机器人讲座 —— 机器人系统的鲁棒和松弛时态逻辑规划
CMU 最优控制 2024 第 7 讲 线性二次调节器的三种方法
基于搭建的仿真Livox mid360雷达与仿真环境实现LeGO-LOAM
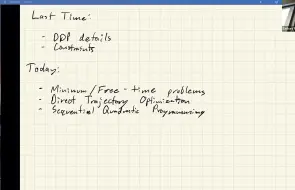
CMU 最优控制 2024 第 12 讲 直接轨迹优化
CMU 最优控制 2024 第 10 讲 非线性轨迹优化
西北大学机器人讲座 —— 机器人学习的控制原理
CoRL 机器人讲座 —— 通向通用机器人之路
CMU 最优控制 2024 第 19 讲 卡尔曼滤波器和二重性
C6-2智能车的建图与自主实现教程
ETHZ ROS 教程 第 1 讲 ROS 简介
实时最优控制讲座 —— TrajectoryOptimization.jl 教程
CoRL 讲座 Russ Tedrake - 从鲁棒控制到基础模型,对鲁棒性的看法多种多样
足式运动和操作的实时最优控制 - Marco Hutter
【S3】中文字幕|They Built This Robot For Your Home | 1X Technologies
【刘佳】从零开始制作AlphaGo围棋:利用监督学习搭建围棋AI
USC 2024 机器人基础 第 17 讲 基于采样的运动规划 I
【开源无人机】从零调试一架开源无人机
用于控制、推理和学习的随机扩散
密歇根大学机器人讲座 —— 基于分层优化控制的敏捷自适应四足机器人
基于 ROS2 仿真的入门者开发实践
斯坦福机器人讲座 - 利用密集型光学触觉传感器提高机器人的灵活性
机器学习-强化学习详解!这绝对是全网最简单的强化学习基础概念与算法讲解,代码实战!
USC 2024 机器人基础 第 19 讲 马尔科夫决策过程