V
主页
京东 11.11 红包
Isaac ROS Office Hours
发布人
Join us for the Isaac ROS Office Hours series and get your questions answered by NVIDIA experts, and enhance your robotics perception skills. Add to your calendar now: https://www.addevent.com/event/oO2001... For more info on Isaac ROS, please check out: https://developer.nvidia.com/isaac-ros Official Support Forum for Isaac ROS: https://forums.developer.nvidia.com/c... Chat with other users in the #isaac_sim channel on the Omniverse Discord server: / discord We will broadcast to: YouTube (previous streams also available here): https://www.youtube.com/@NVIDIAOmnive... Twitch: https://twitch.com/nvidiaomniverse Review/add upcoming events/livestreams to your own calendar: https://addevent.com/calendar/ae483892 NVIDIA Omniverse community page: https://nvidia.com/omnivores
打开封面
下载高清视频
观看高清视频
视频下载器
MIT 机器人讲座 —— MuJoCo MPC (MJPC) 介绍
IROS 2023 讲座 —— 从基于模型的全身控制到利用 ML 进行足式人形机器人操作
【中英字幕】强化学习和模型预测控制18讲!四大名校教授精讲模型预测控制、最优控制、强化学习入门
开源人形机器人强化学习训练框架!星动纪元联合清华大学、上海期智研究院发布Humanoid-Gym!
IsaacLab交流群及文档更新说明
ETH 讲座 —— 机器人的感知和学习:ML 最佳实践项目
ETH + Oxford 四足机器人研究 —— 野外视觉导航的快速可穿越性估计
这可能是我见过强化学习和模型预测控制最好的教程!四大名校教授精讲动态系统和仿真、最优控制、策略梯度方法、MPC
实时最优控制讲座 —— 最优控制机器人软件
EPFL 四足机器人研究 —— ManyQuadrupeds: 多种类四足机器人学习运动策略(ICRA 2024)
意大利 IIT 讲座 —— 结合学习和模型预测控制的机器人安全控制
MPC+强化学习!Actor Critic模型预测控制,苏黎世大牛教授人类水平性能的自主视觉无人机演讲
实时最优控制讲座 —— 从航空航天的角度
斯坦福大学开源 - 机器人技能学习 通用操作接口 UMI (Universal Manipulation Interface) Demo
CMU 机器人讲座 —— 构建适应性强的通用机器人
用 ROS 2 在 Isaac Sim 中驾驶自主移动机器人
斯坦福开源 - 机器人技能学习 通用接口UMI - 机械夹爪 3D 打印教程
实时最优控制讲座 —— OCS2 教程
RoMI Lab 研究 —— 通过全身 MPC 和最优区域选择实现感知运动
NVIDIA Isaac 讲座 —— 使用 ROS 2 控制自主移动机器人
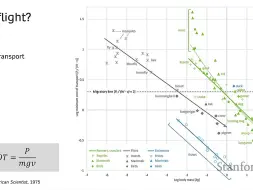
斯坦福机器人讲座 - Flying Robots Exploring Hybrid Locomotion and Physical Interaction
密歇根大学机器人讲座 —— 机器人学中的高效通用算法
足式运动和操作的实时最优控制 - Marco Hutter
USC 机器人讲座 —— 复杂地形上的机器人运动与感知
SkiROS2 - 基于技能操作的 ROS 机器人控制平台
CMU 最优控制 2024 第一讲
斯坦福机器人讲座 —— 人与机器人交互
CMU 最优控制 2024 第 17 讲 迭代学习控制(Iterative Learning Control)
开源人形机器人强化学习训练框架!星动纪元联合清华大学、上海期智研究院发布Humanoid-Gym
运用AI技术实现游戏自动化!所用到的YOLO技术原理原来是这样的!计算机大佬手把手教学YOLOv5基础原理及代码复现!
CMU 最优控制 2024 第 10 讲 非线性轨迹优化
顶尖院校联合开源 - 机器人操作数据集 —— DROID: 大规模机器人操作数据集
深度无监督学习 UC 伯克利 2024 第 6 讲 扩散模型
波士顿动力 Predictably Spot-On Industrial Inspection Boston Dynamics
人形机器人量产临近,深度梳理5家核心公司
入门到成神!三小时可快速上手的【深度强化学习】,不愧是北大王树森博士,讲的是真的通俗易懂!
CoRL 机器人讲座 —— 通向通用机器人之路
西北大学机器人讲座 —— 机器人学习的控制原理
ETH ICRA 2024 - 多无人机分散式森林快速探索
CoRL 讲座 Russ Tedrake - 从鲁棒控制到基础模型,对鲁棒性的看法多种多样