V
主页
mpu6050平衡模型
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
陀螺仪加速度计MPU6050模块应用!加上卡尔曼滤波果然就不一样。
成本二十几块的飞控就大功告成了
使用MPU6050+卡尔曼滤波+pid使小车走直线,几乎无漂移
pid巡线(失败大哭😭)
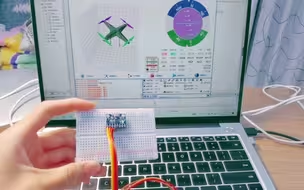
mpu6050手姿检测,二维云台同步控制
自锁定,大炮打蚊子
手搓平衡小车
电子模块就三类
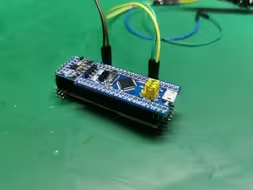
MPU6050(DMP)简单读一下数据
直流电机重力补偿
MPU6050陀螺仪加速度模块完整教程✔ 两个案例演示✔ ✔
校赛c题,圆是最简单的
水一下本科毕设
速度控制器
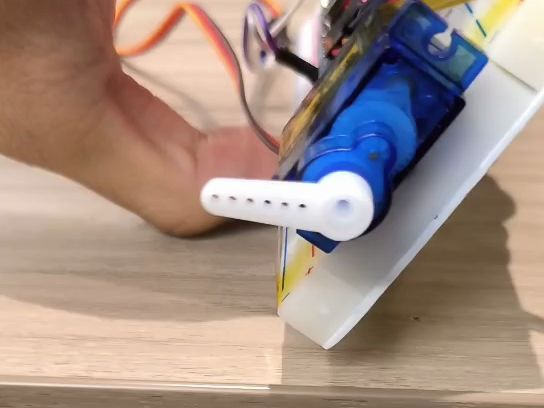
舵机+齿轮齿条 都能用来干什么呢?
支撑嘛 不必太正经
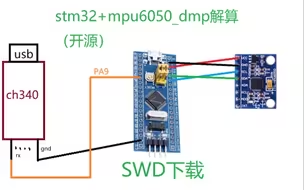
mpu6050_dmp姿态解算,开源,stm32欧拉角解算,代码在视频说明里,欢迎白嫖
寻迹中加入mpu6050转向真的稳。诚恳大佬批评指正。冲冲冲
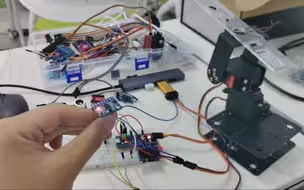
玩玩实验室里的二维云台+陀螺仪
dmp解算mpu6050控制舵机
mpu6050旋转立方体
PID太难调了,都抖成拖拉机了
为了点亮这一块屏幕,我已经整整24小时没休息了ಥ_ಥ
open MV+STM32视觉巡线小车(路线规划算法)
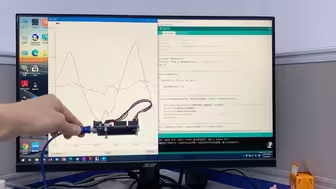
20秒明白PID!PID仿真网站,直观学习PID各参数对被控物体的效果
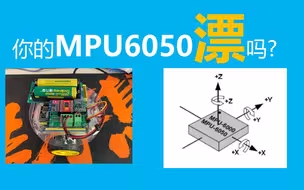
如何处理电子陀螺仪MPU6050的零点漂移问题
当你的独轮车几乎静止了
小玩意还不让摸了??!\(`Δ’)/
电子工程师说:这块电路板看着就不一般!
调了半个月pid滤波,总算不抖了
无编码器平衡车基本稳了
自锁定 相控阵雷达
开启后吸引了整个实验室目光的PID平衡车
STM32读取MPU6050角度数据
卡尔曼滤波预测篮球
开源!!!复刻一个桌面电子小狗!!Keil标准库版本
mpu6050滤波,非dmp库解算,解算出来非常稳定的yaw,没有漂移,没有静态累计误差,可移植M0端mcu
[STM32] 基于MPU6050的小游戏 模拟射击
简易舵机开关
我家哈士奇看了都会的平衡车教程(课程准备阶段1)