V
主页
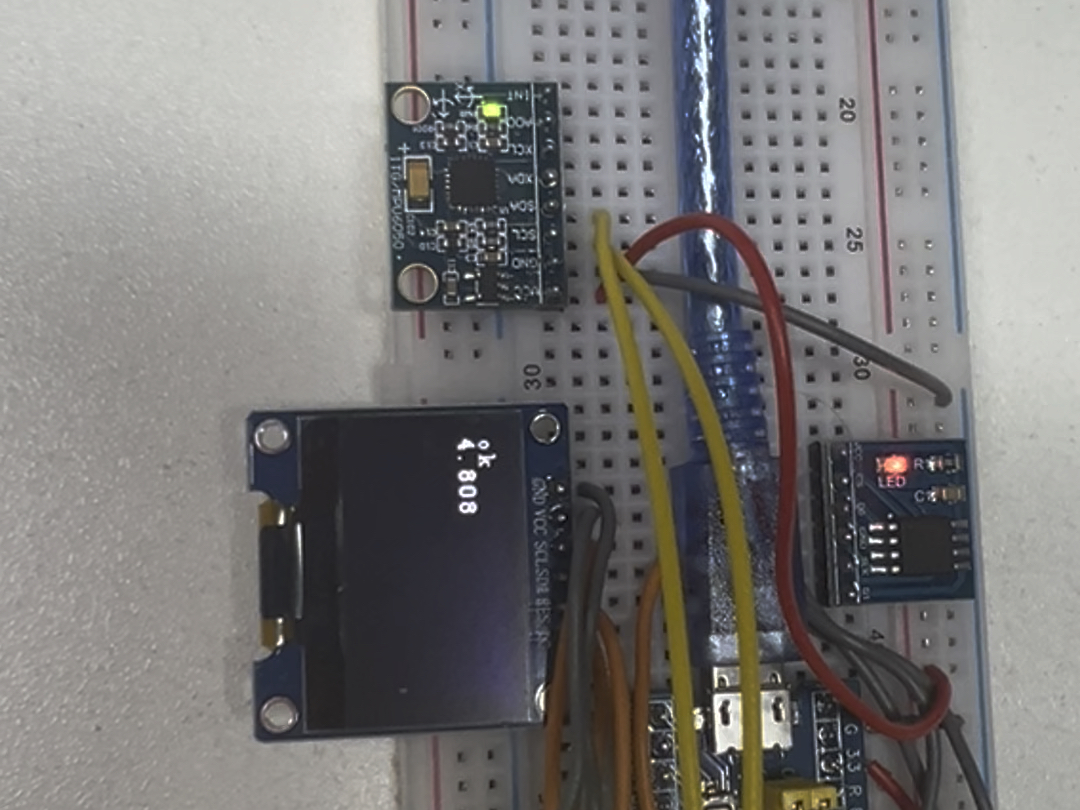
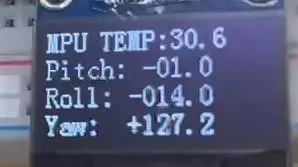
mpu6050滤波,非dmp库解算,解算出来非常稳定的yaw,没有漂移,没有静态累计误差,可移植M0端mcu
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
[免费开源]MPU6050四元数姿态解算
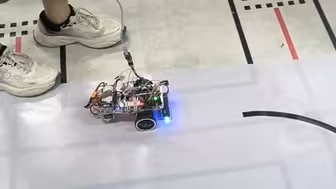
使用MPU6050+卡尔曼滤波+pid使小车走直线,几乎无漂移
基于MPU6050的姿态解算(没有使用DMP)
mpu6050平衡模型
2024电赛h题,33秒,mpu6050
听说今年电赛F题是磁悬浮?
2024年电赛H题?惯导秒了,感谢王神的代码,半小时完赛
mpu6050互补滤波效果还可以
电赛第一天
24年电赛用到的,陀螺仪+PID让小车走走线,可以走好几米,稳稳的。
电赛h题秒变智能车,家人们谁懂
2024电赛H题通过mpu6050控制小车转角
dmp解算mpu6050控制舵机
陀螺仪丝滑转向环,可任意角度旋转
MPU6050(DMP)简单读一下数据
2024电赛H题 小帅车
24电赛H题,不到15s一圈,下班![开源置顶]
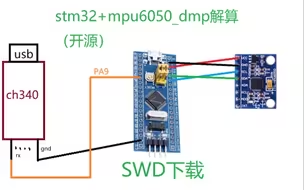
mpu6050_dmp姿态解算,开源,stm32欧拉角解算,代码在视频说明里,欢迎白嫖
mpu6050dmp偏航角无漂移体感控制
丝滑,i2c电容触摸滑条
2024年电赛H题,完工下班
stm32 DMP库姿态解算
2024电赛H,开环跑。
mpu6050,从研究到放弃
研究了一个月的卡尔曼滤波和四元数,今天手动解算姿态角成功。对比一下手动解算和DMP解算。
陀螺仪加速度计MPU6050模块应用!加上卡尔曼滤波果然就不一样。
2024电赛h题任务4 能跑了可以提速了
MPU6050姿态解算
电赛h题 第二题 7秒
大炮打蚊子,电赛E题,秒啦
2024电赛H题,遛电子宠物~
电赛h题,惯导秒啦,王哥太牛啦
stm32基于HAL库读取MPU6050-卡尔曼滤波姿态解算
2024电赛前两问,无名创新nb!
MPU6050角度环控制[开源]
2024电赛H题,惯导秒啦
角度闭环的小车,稳如老狗
MPU6050卡死问题,已解决
电赛h题王佬的无敌惯导(开源欧)
电赛第二天,H题旋转一分钟