V
主页
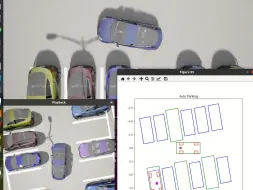
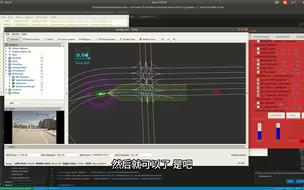
自动驾驶规划控制之autoware-carla联合仿真open planner停障功能
发布人
系统入门自动驾驶决策规划系列 自动驾驶规划控制之autoware-carla联合仿真open planner停障功能
打开封面
下载高清视频
观看高清视频
视频下载器
ROS2自动驾驶|边做边学(二)地图与定位
自动驾驶决策规划论文专题交流(二):Motion Planning for Autonomous Driving
在carla中基于hybrid a* 算法的自动泊车代码
【自动驾驶技术】花18000大价钱买的无人驾驶课程,从入门到提升的自动驾驶算法——感知实战、视觉定位、预测系统、路径规划、控制理论、强化学习
carla-autoware联合仿真-open planer避障教程三
重磅推出ros2版本自动驾驶决策规划算法移植工程
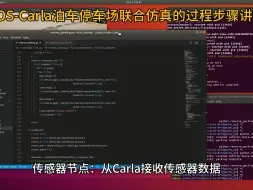
ROS-Carla泊车停车场联合仿真过程步骤讲解
carla-autoware联合仿真-open planer避障教程一
自动驾驶路径规划算法入门-Autoware.ai-carla联合仿真使用介绍
自动驾驶决策规划学习之ros2-carla0.9.13联合仿真lattice避障示例
自动驾驶路径规划ros移植-Autoware.ai-carla联合仿真
自动驾驶决策规划论文交流(三)自动驾驶端到端论文
自动驾驶路径规划ros-carla联合仿真使用
自动驾驶路径规划-Lanelet教程
自动驾驶多智能体深度强化学习-入门知识
无人之路:openpilot 与 comma.ai 的开源智能驾驶探索|Benefited from Open Source
231230直播回放:自动驾驶qp二次优化实例讲解
Frenet坐标系双t规划算法的代码原理讲解(一)
《基于ROS2的决策规划算法工程》动态避障演示 无人小车的松弛感
自动驾驶规划控制之autoware-carla联合仿真open planner停障功能
《ROS 2机器人开发从入门到实践》1.2.4 在Ubuntu中安装ROS2
强推!2024年站最系统的无人驾驶技术全套教程,一口气带你学完感知实战、视觉定位、路径规划、预测系统,从入门到进阶!!!(自动驾驶/无人驾驶/人工智能/AI)
【ROS2】可以轻松在WSL2上运行的ROS2版本OCS2机器人控制库
Autoware.ai-carla联合仿真、泊车场景-dl-iaps优化、ros-carla泊车停车场联合仿演示
【迷茫攻城狮】我的最新作品,快来一睹为快!
Lanelet教程-JOSM画图补充注意点
carla-autoware联合仿真-open planer避障教程二
carla交叉口动态避障
被PPO算法惊艳到了--自动驾驶强化学习决策规划工程-PPO算法实战
自动驾驶深度强化学习-HighwayEnv安装使用
自动驾驶路径规划算法入门-Autoware.ai-carla联合仿真使用介绍
自动驾驶规划算法入门实战学习-teb规划算法的应用
Frenet坐标系双t规划算法的代码原理讲解(二)
自动驾驶规控学习之--OpenPlanner-停障等功能演示
《ROS 2机器人开发从入门到实践》1.3 运行你的第一个机器人
自动驾驶路径规划-控制决策入门学习
自动驾驶深度强化学习DRL-遮挡探头场景demo 训练全过程
自动驾驶路径规划算法入门-autoware的实战使用
自动驾驶路径规划-控制决策入门学习
自动驾驶决策规划学习之ros2-carla0.9.13联合仿真lattcie导航示例