V
主页
京东 11.11 红包
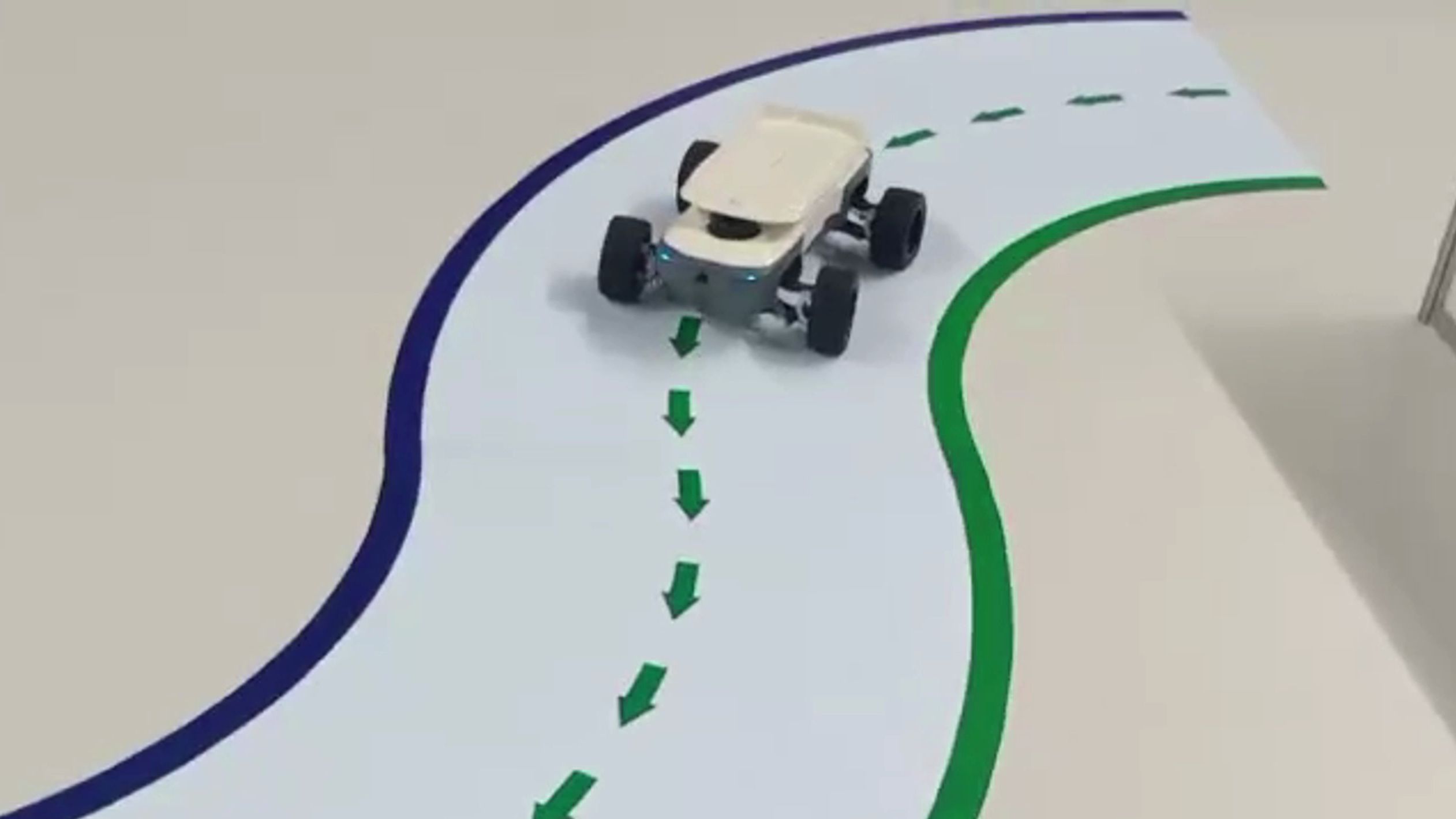
全国大学生智能汽车竞赛ROS创意组视频(2023.4-2023.8)补发(一): 国赛调试片段
发布人
视频演示内容为我2023.4-2023.8参加的全国大学生智能汽车竞赛ROS创意组相关视频,当时没有发,现在补发一下,预计会补发两个视频,本视频为补发的第一个视频,内容是国赛调试片段,可惜的是,比赛视频没有安排人录制,没有留下视频资料。以圆梦国一结束了我的智能车竞赛生涯。
打开封面
下载高清视频
观看高清视频
视频下载器
全国大学生智能汽车竞赛ROS创意组视频(2023.4-2023.8)补发(二): 备赛阶段视频留念,可以连跑几十圈超长续航!!!
本科毕设视频(2022.1-2022.5)补发(一): 未知动态环境下移动机器人运动规划算法设计与实现实验过程视频展示
路径规划|基于维诺图的路径规划算法(ROS C++/Python/Matlab实现)
本科毕设视频(2022.1-2022.5)补发(二): 未知动态环境下移动机器人运动规划算法设计与实现-规划过程可视化演示版
基于PSO和LQR算法的ROS局部路径规划器(开源)
无人驾驶CAN通信快速入门:部署、测试,全过程精细讲解(主讲录制人:严正清;技术小组:小组:陈云、贾岚博、刘志强、张连会)
【开源教程】ROS+PX4开源机械臂控制(下)
听劝不要轻易入坑SLAM
【开源教程】ROS+PX4开源机械臂控制(上)
有电脑就行!三分钟安装 openEuler 操作系统并搭建ROS环境
A星+DWA算法融合路径规划(动态+静态避障)
ROS控制 | 第一轮控制功能包讲解
【开源无人机】ROS无人机编队代码讲解
全天候无人垂直农场|高新技术赋能现代农业的典范
论文复现:MPC-D-CBF (基于动态屏障函数的移动机器人balabala的模型预测控制)
这么简单好用的 ROS 定位方法,确定不要试一下吗?!
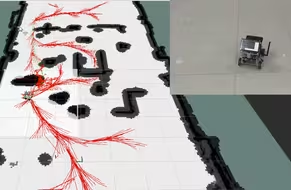
ROS机器人未知环境自主探索大地图测试效果演示
【开源教程】ROS基础例程详解
把玩 HybridAstar -- 双向搜索初步
【开源无人船】从零组装一艘测绘无人船
IEEE顶刊:水下机器人AUV路径规划和MPC模型预测控制跟踪控制(复现)
基于L-BFGS优化算法的路径规划效果演示
未知环境在线运动规划
自动泊车,享优雅人生
【暂时放弃的方案】RACER+倒置激光雷达自主探索无人机测试
成为机器人专家的第一步:掌握这3个前提条件 🤖
VINS算法视觉惯导融合SLAM
SLAM系统的2种设计范式
史上最强换脸软件FaceFusion3.0来了(附整合包)!从安装到使用一个视频讲明白!增加最新换脸模型+人脸解析模型、支持LivePortrait表情控制
【开源无人机】室内款低成本无人机M0-F250介绍及代码讲解
SPF-EMPC Planner
来个全新岚图梦想家自动泊车上点强度
【自制】一台纯手撸的3D打印机械臂
无需SLAM算法,直接生成Gazebo仿真环境对应的高质量真值地图的工具 pgm_map_creator,手把手逐步详细讲解安装部署和使用方法【开源】
V40的配置还是蛮高的
腾势Z9GT自动泊车测试,这是一个厂家想要删除的视频
以后的车都不用自己开了?
7.2无人机PID参数调试
ROS Gazebo复杂动态仿真环境设计(60x60m)
混合A*实现