V
主页
京东 11.11 红包
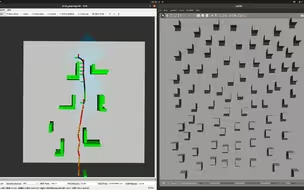
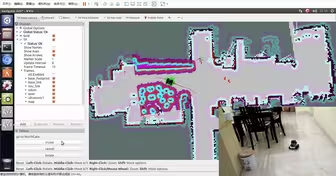
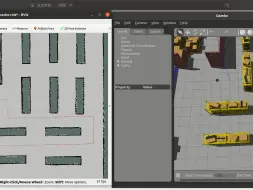
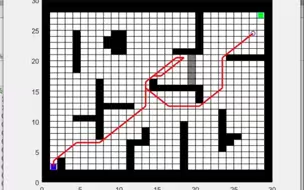
ROS机器人未知环境自主探索大地图测试效果演示
发布人
视频所演示的实现未知环境自主探索功能的开源功能包为:explore_lite 其开源源码链接如下:https://github.com/hrnr/m-explore/tree/noetic-devel 经测试效果良好,感谢作者开源 我针对该功能包进行了详细的源码解析,并对其实现未知环境自主探索功能的原理及流程总结 我编写的原创系列博客链接如下:https://blog.csdn.net/qq_44339029/article/details/137207553
打开封面
下载高清视频
观看高清视频
视频下载器
具有交互意识的移动操作器自主探索
Gazobo仿真环境下的自动驾驶小车
复杂环境下的实时路径规划
T-ASE CURE: 基于未知区域质心的多机器人自主探索
Star-Searcher:复杂未知环境中自主搜索目标的高效完备空中系统 IEEE RAL
基于博弈论的机器人鲁棒自主探索 An Active Perception Game for Robust Autonomous Exploration
机器人自主探索(gmapping,cartographer对比试验)
多智能体强化学习——未知环境协同探索建图
【ROS】使用Gmapping算法建图与A*路径规划算法导航的智能小车,GUI界面显示
无人机自主搜寻(2.1)—探索算法对比
ROS 路径规划中,绘制固定路经
丁帧教你ROS基于Gazebo实现机器人自动路径规划和视觉识别
【A*路径规划】机器人|Gazebo|TurtleBot3|ROS2|
开源!基于A*的路径规划算法(ROS/Python/Matlab实现)
在Gazebo仿真环境下基于ROS的自动驾驶小车
XJU移动机器人仿真-第1期 环境搭建(gazebo模型 插件 urdf rviz)
Gazebo仿真环境下的小车使用ROS实现识别及导航
为何不看好 机器人ROS开发
基于分层决策的主动探索框架
四轮小车导航规划,快速全局路径规划和局部路径规划,可以实现倒车规划,动态避障
我的毕设演示:基于激光雷达的智能巡检小车
自主移动机器人-建图-定位-导航
#ROS调包侠#rrt_exploration自主探索建图
学妹做的ros小车,浅浅的建个图吧
ros 路径规划 全局采用固定路径,局部采用纯跟随算法(RPP)
本科毕设视频(2022.1-2022.5)补发(一): 未知动态环境下移动机器人运动规划算法设计与实现实验过程视频展示
ROS中自定义全局规划器(上)_算法部署
ROS的TEB局部路径规划器全局路径处理过程示意
本科毕设视频(2022.1-2022.5)补发(二): 未知动态环境下移动机器人运动规划算法设计与实现-规划过程可视化演示版
Gmapping自主探索建图(Frontier-based)
D* Dstar 路径规划 未知突然出现障碍物 动态规划规划
【ROS路径规划快速入门】ROS1 A星+PID 运行平台
【ROS】非常好gmapping,使我的map旋转
基于PSO和LQR算法的ROS局部路径规划器(开源)
无需SLAM算法,直接生成Gazebo仿真环境对应的高质量真值地图的工具 pgm_map_creator,手把手逐步详细讲解安装部署和使用方法【开源】
基于ROS的全覆盖路径规划算法
ROS Gazebo复杂动态仿真环境设计(60x60m)
全国大学生智能汽车竞赛ROS创意组视频(2023.4-2023.8)补发(一): 国赛调试片段
基于L-BFGS优化算法的路径规划效果演示
机器人导航算法应该怎么学(1)